给我的文件不对
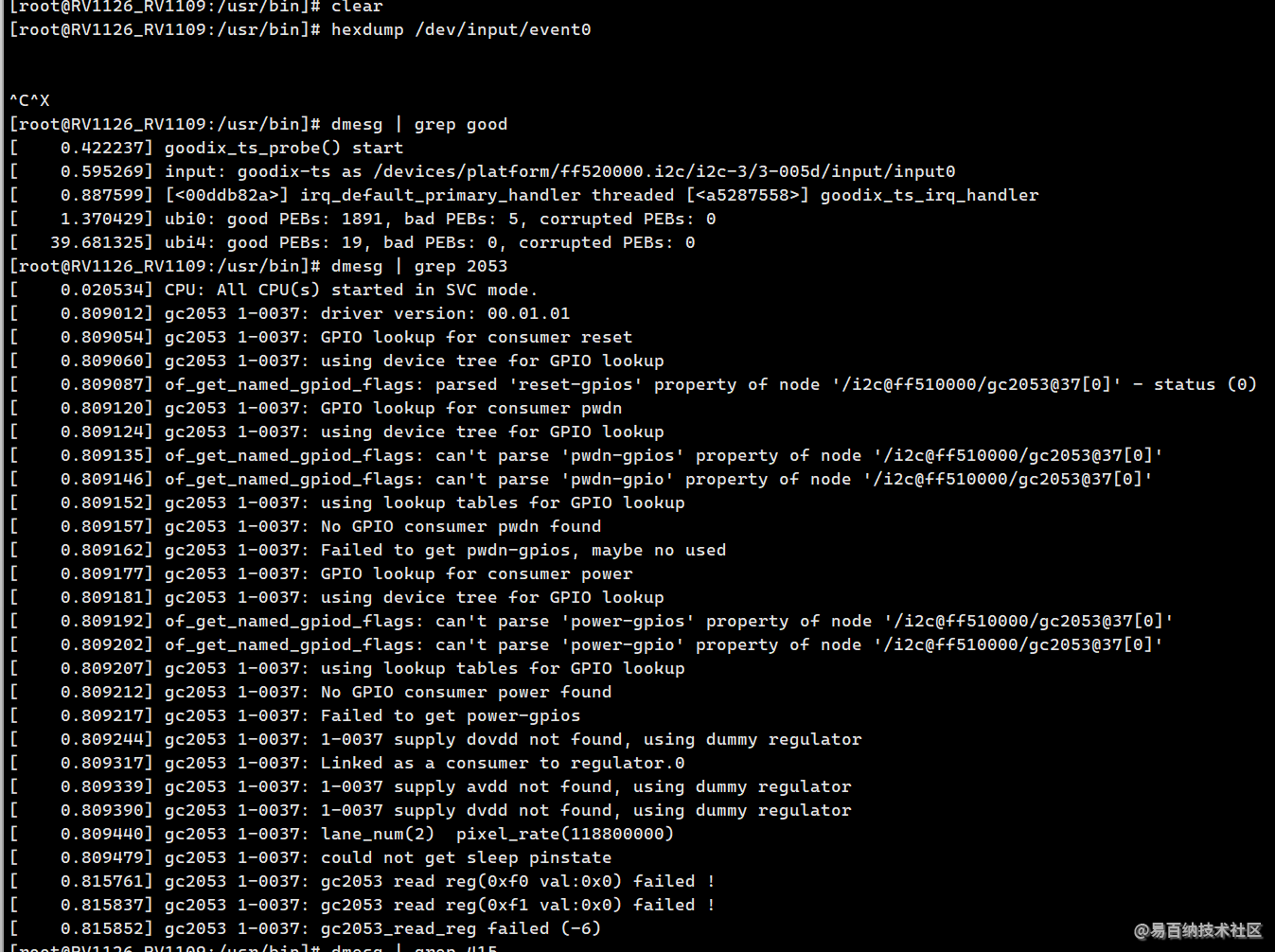
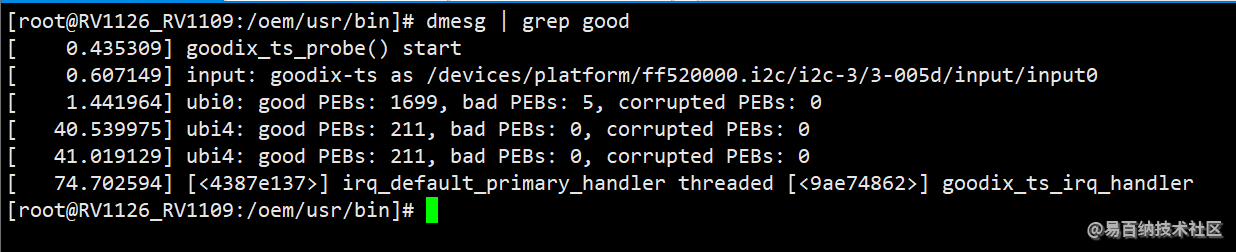
我用的415的 出来的却是2053的 并且屏幕触摸也不行
这就是我现在用的
// SPDX-License-Identifier: (GPL-2.0+ OR MIT)
/*
* Copyright (c) 2020 Rockchip Electronics Co., Ltd.
*/
/dts-v1/;
#include "rv1126.dtsi"
#include "rv1126-ipc.dtsi"
#include <dt-bindings/display/drm_mipi_dsi.h>
/ {
model = "Rockchip RV1109 38 V10 SPI NAND DDR3 Board";
compatible = "rockchip,rv1109-38-v10-spi-nand", "rockchip,rv1109";
chosen {
//bootargs = "earlycon=uart8250,mmio32,0xff570000 console=ttyFIQ0 ubi.mtd=3 ubi.block=0,rootfs root=/dev/ubiblock0_0 rootfstype=squashfs snd_aloop.index=7";
bootargs = "earlycon=uart8250,mmio32,0xff570000 console=ttyFIQ0 ubi.mtd=3 root=ubi0:rootfs rootfstype=ubifs snd_aloop.index=7";
};
/delete-node/ vdd-npu;
/delete-node/ vdd-vepu;
cam_ircut0: cam_ircut {
compatible = "rockchip,ircut";
status = "okay";
ircut-open-gpios = <&gpio3 RK_PB1 GPIO_ACTIVE_HIGH>;
ircut-close-gpios = <&gpio3 RK_PB0 GPIO_ACTIVE_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&ircut_pins>;
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
};
vcc_1v8: vcc-1v8 {
compatible = "regulator-fixed";
regulator-name = "vcc_1v8";
regulator-always-on;
regulator-boot-on;
regulator-min-microvolt = <1800000>;
regulator-max-microvolt = <1800000>;
};
vcc_dvdd: vcc-dvdd {
compatible = "regulator-fixed";
regulator-name = "vcc_dvdd";
regulator-always-on;
regulator-boot-on;
regulator-min-microvolt = <1200000>;
regulator-max-microvolt = <1200000>;
};
vcc3v3_sys: vcc33sys {
compatible = "regulator-fixed";
regulator-name = "vcc3v3_sys";
regulator-always-on;
regulator-boot-on;
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
};
vcc_sd: vcc-sd {
compatible = "regulator-fixed";
gpio = <&gpio0 RK_PA4 GPIO_ACTIVE_HIGH>;
pinctrl-0 = <&sdmmc_pwr>;
pinctrl-names = "default";
regulator-name = "vcc_sd";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
startup-delay-us = <100000>;
vin-supply = <&vcc3v3_sys>;
enable-active-high;
};
vdd_arm: vdd-arm {
compatible = "pwm-regulator";
pwms = <&pwm0 0 5000 1>;
regulator-name = "vdd_arm";
regulator-min-microvolt = <720000>;
regulator-max-microvolt = <1000000>;
regulator-init-microvolt = <825000>;
regulator-always-on;
regulator-boot-on;
regulator-settling-time-up-us = <250>;
pwm-supply = <&vcc3v3_sys>;
status = "okay";
};
/*
* pwm1 is reserved as voltage adjustment in hardware
* use fixed regulator to avoid voltage adjustment by software
*/
vdd_logic_npu_vepu: vdd-logic-npu-vepu {
compatible = "pwm-regulator";
pwms = <&pwm1 0 5000 1>;
regulator-name = "vdd_logic_npu_vepu";
regulator-min-microvolt = <720000>;
regulator-max-microvolt = <880000>;
regulator-init-microvolt = <825000>;
regulator-always-on;
regulator-boot-on;
regulator-settling-time-up-us = <250>;
pwm-supply = <&vcc3v3_sys>;
status = "okay";
};
vdd_logic_npu_vepu_fixed: vdd-logic-npu-vepu-fixed {
compatible = "regulator-fixed";
regulator-name = "vdd_logic_npu_vepu-fixed";
regulator-always-on;
regulator-boot-on;
regulator-min-microvolt = <825000>;
regulator-max-microvolt = <825000>;
};
// wireless_wlan: wireless-wlan {
// compatible = "wlan-platdata";
// rockchip,grf = <&grf>;
// wifi_chip_type = "rtl8188fu";
// WIFI,poweren_gpio = <&gpio0 RK_PC0 GPIO_ACTIVE_LOW>;
// status = "okay";
// };
};
&csi_dphy0 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam0: endpoint@1 {
reg = <1>;
remote-endpoint = <&ucam_out0>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
csidphy0_out: endpoint@0 {
reg = <0>;
//remote-endpoint = <&mipi_csi2_input>;
remote-endpoint = <&isp_in>;
data-lanes = <1 2>;
};
};
};
};
/*
&mipi_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&csidphy0_out>;
data-lanes = <1 2 3 4>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_in>;
//remote-endpoint = <&isp_in>;
data-lanes = <1 2 3 4>;
};
};
};
};
&rkcif {
status = "okay";
};
&rkcif_mmu {
status = "disabled";
};
&rkcif_mipi_lvds {
status = "okay";
rockchip,cif-monitor = <3 2 10 1000 5>;
port {
//MIPI CSI-2 endpoint
cif_mipi_in: endpoint {
remote-endpoint = <&mipi_csi2_output>;
data-lanes = <1 2 3 4>;
};
};
};
&rkcif_mipi_lvds_sditf {
status = "okay";
port {
//MIPI CSI-2 endpoint
mipi_lvds_sditf: endpoint {
remote-endpoint = <&isp_in>;
data-lanes = <1 2 3 4>;
};
};
};
*/
&gmac {
phy-mode = "rmii";
clock_in_out = "output";
snps,reset-gpio = <&gpio3 RK_PC5 GPIO_ACTIVE_LOW>;
snps,reset-active-low;
snps,reset-delays-us = <0 50000 50000>;
assigned-clocks = <&cru CLK_GMAC_SRC>, <&cru CLK_GMAC_TX_RX>;
assigned-clock-parents = <&cru CLK_GMAC_SRC_M0>, <&cru RMII_MODE_CLK>;
assigned-clock-rates = <50000000>;
pinctrl-names = "default";
pinctrl-0 = <&rmiim0_miim &rgmiim0_rxer &rmiim0_bus2 &rgmiim0_mclkinout_level0>;
phy-handle = <&phy>;
status = "okay";
};
/*
&i2c1 {
status = "okay";
clock-frequency = <400000>;
os04a10: os04a10@36 {
compatible = "ovti,os04a10";
reg = <0x36>;
clocks = <&cru CLK_MIPICSI_OUT>;
clock-names = "xvclk";
power-domains = <&power RV1126_PD_VI>;
pinctrl-names = "rockchip,camera_default";
pinctrl-0 = <&mipicsi_clk0>;
avdd-supply = <&vcc3v3_sys>;
dovdd-supply = <&vcc_1v8>;
dvdd-supply = <&vcc_dvdd>;
pwdn-gpios = <&gpio1 RK_PD4 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio1 RK_PD5 GPIO_ACTIVE_LOW>;
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
rockchip,camera-module-name = "CMK-OT1607-FV1";
rockchip,camera-module-lens-name = "M12-40IRC-4MP-F16";
ir-cut = <&cam_ircut0>;
port {
ucam_out0: endpoint {
remote-endpoint = <&mipi_in_ucam0>;
data-lanes = <1 2 3 4>;
};
};
};
};
*/
&i2c1 {
status = "okay";
clock-frequency = <400000>;
gc2053: gc2053@37 {
compatible = "galaxycore,gc2053";
reg = <0x37>;
clocks = <&cru CLK_MIPICSI_OUT>;
clock-names = "xvclk";
power-domains = <&power RV1126_PD_VI>;
pinctrl-names = "rockchip,camera_default";
pinctrl-0 = <&mipicsi_clk0>;
// avdd-supply = <&vcc3v3_sys>;
// dovdd-supply = <&vcc_1v8>;
// dvdd-supply = <&vcc_dvdd>;
// pwdn-gpios = <&gpio1 RK_PD4 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio1 RK_PD5 GPIO_ACTIVE_LOW>;
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
rockchip,camera-module-name = "CMK-OT1726-PG1";
rockchip,camera-module-lens-name = "29IR-2MP-F25";
ir-cut = <&cam_ircut0>;
port {
ucam_out0: endpoint {
remote-endpoint = <&mipi_in_ucam0>;
data-lanes = <1 2>;
};
};
};
};
&display_subsystem {
status = "okay";
};
&route_dsi {
status = "okay";
};
&vop {
status = "okay";
};
&vop_mmu {
status = "okay";
};
&mipi_dphy {
status = "okay";
};
&i2c3 {
status = "okay";
clock-frequency = <400000>;
pinctrl-names = "default";
pinctrl-0 = <&i2c3m1_xfer>;
gt9xx: gt9xx@5d {
compatible = "goodix,gt9xx";
reg = <0x5d>;
// gtp_ics_slot_report;
touch-gpio = <&gpio2 RK_PA6 IRQ_TYPE_EDGE_RISING>;
reset-gpio = <&gpio2 RK_PD6 GPIO_ACTIVE_HIGH>;
max-x = <1024>;
max-y = <600>;
tp-size = <911>;
// power-supply = <&vcc18_lcd_n>;
};
};
&i2c3 {
status = "okay";
icn6211: icn6211@2c {
compatible = "icn6211";
reg = <0x2c>;
};
};
&dsi {
status = "okay";
rockchip,lane-rate = <480>;
panel@0 {
compatible ="simple-panel-dsi";
reg = <0>;
//backlight = <&backlight>;
//power-supply = <&vcc18_lcd_n>;
prepare-delay-ms = <5>;
reset-delay-ms = <1>;
init-delay-ms = <80>;
disable-delay-ms = <10>;
unprepare-delay-ms = <5>;
width-mm = <165>;
height-mm = <100>;
// enable-gpios = <&gpio2 RK_PA7 GPIO_ACTIVE_HIGH>;
// reset-gpios = <&gpio2 RK_PD6 GPIO_ACTIVE_LOW>;
dsi,flags = <(MIPI_DSI_MODE_VIDEO | MIPI_DSI_MODE_VIDEO_BURST |
MIPI_DSI_MODE_LPM | MIPI_DSI_MODE_EOT_PACKET)>;
dsi,format = <MIPI_DSI_FMT_RGB888>;
dsi,lanes = <4>;
// panel-init-sequence = [
// 05 78 01 11
// 05 78 01 29
// ];
display-timings {
native-mode = <&timing0>;
timing0: timing0 {
clock-frequency = <33359000>;
hactive = <1024>;
vactive = <600>;
hback-porch = <50>;
hfront-porch = <50>;
vback-porch = <17>;
vfront-porch = <18>;
hsync-len = <7>;
vsync-len = <5>;
hsync-active = <0>;
vsync-active = <0>;
de-active = <0>;
pixelclk-active = <0>;
};
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
panel_in_dsi: endpoint {
remote-endpoint = <&dsi_out_panel>;
};
};
};
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@1 {
reg = <1>;
dsi_out_panel: endpoint {
remote-endpoint = <&panel_in_dsi>;
};
};
};
};
&mdio {
phy: phy@0 {
compatible = "ethernet-phy-ieee802.3-c22";
reg = <0x0>;
};
};
&nandc {
status = "okay";
};
&npu {
npu-supply = <&vdd_logic_npu_vepu_fixed>;
};
&pinctrl {
ircut {
/omit-if-no-ref/
ircut_pins: ircut-pins {
rockchip,pins = <3 RK_PB0 RK_FUNC_GPIO &pcfg_pull_up>,
<3 RK_PB1 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
sdmmc-pwr {
/omit-if-no-ref/
sdmmc_pwr: sdmmc-pwr {
rockchip,pins = <0 RK_PA4 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
};
&pmu_io_domains {
status = "okay";
pmuio0-supply = <&vcc3v3_sys>;
pmuio1-supply = <&vcc3v3_sys>;
vccio2-supply = <&vcc3v3_sys>;
vccio4-supply = <&vcc_1v8>;
vccio5-supply = <&vcc3v3_sys>;
vccio6-supply = <&vcc3v3_sys>;
vccio7-supply = <&vcc3v3_sys>;
};
&rkisp_vir0 {
status = "okay";
ports {
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
isp_in: endpoint@0 {
reg = <0>;
remote-endpoint = <&csidphy0_out>;
//remote-endpoint = <&mipi_lvds_sditf>;
};
};
};
};
&rkvenc {
venc-supply = <&vdd_logic_npu_vepu_fixed>;
};
&rockchip_suspend {
status = "okay";
rockchip,sleep-debug-en = <1>;
rockchip,sleep-mode-config = <
(0
| RKPM_SLP_ARMOFF
| RKPM_SLP_PMU_PMUALIVE_32K
| RKPM_SLP_PMU_DIS_OSC
)
>;
};
&sdmmc0_bus4 {
rockchip,pins =
/* sdmmc0_d0 */
<1 RK_PA4 1 &pcfg_pull_up_drv_level_0>,
/* sdmmc0_d1 */
<1 RK_PA5 1 &pcfg_pull_up_drv_level_0>,
/* sdmmc0_d2 */
<1 RK_PA6 1 &pcfg_pull_up_drv_level_0>,
/* sdmmc0_d3 */
<1 RK_PA7 1 &pcfg_pull_up_drv_level_0>;
};
&sdmmc0_clk {
rockchip,pins =
/* sdmmc0_clk */
<1 RK_PB0 1 &pcfg_pull_up_drv_level_3>;
};
&sdmmc0_cmd {
rockchip,pins =
/* sdmmc0_cmd */
<1 RK_PB1 1 &pcfg_pull_up_drv_level_0>;
};
&sdmmc {
bus-width = <4>;
cap-mmc-highspeed;
cap-sd-highspeed;
card-detect-delay = <200>;
rockchip,default-sample-phase = <90>;
supports-sd;
status = "okay";
vmmc-supply = <&vcc_sd>;
};
&sfc {
status = "okay";
};
&u2phy_host {
status = "okay";
};
&u2phy1 {
status = "okay";
};
&usb_host0_ehci {
status = "okay";
};
&usb_host0_ohci {
status = "okay";
};
&uart3 {
status = "okay";
wakeup-source;
pinctrl-names = "default";
pinctrl-0 = <&uart3m2_xfer &uart3m2_ctsn &uart3m2_rtsn>;
};
&wdt {
status = "okay";
};



 微信扫码分享
微信扫码分享 QQ好友
QQ好友



{kind=link}