


fjh
0个粉丝
5
问答
0
专栏
0
资料
14082
- 收藏
- 点赞
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
冰眼原理图已基本完成,放出来大家看一下,顺便简单介绍下各部分原理
前面说过冰眼板载资源面向WIFI摄像头和四轴飞行器开发,电路板打算直接做成小四轴,具体做什么样的还没想好。
原理图目前已基本做好,细节部分还没有仔细处理,先放出来让大家看看,并简单介绍下原理。
1.电源
板子引出一路USB口,采用Micro USB母座,就是一般手机充电的那种USB口,该接口同时也是板子的供电接口,大家直接用自己的手机充电器或者直接用电脑的USB口就可以对板子供电了,板子不再另配电源适配器。
锂电池的接口还没想好用哪种,最有可能的是可以直接插航模电池那种,这个到画板子时在确定吧。
板载锂电池充电芯片BQ24075(TI),该芯片可以在充电的同时对系统供电,只能充单节的电池,多节并一起或串一起的不可充。
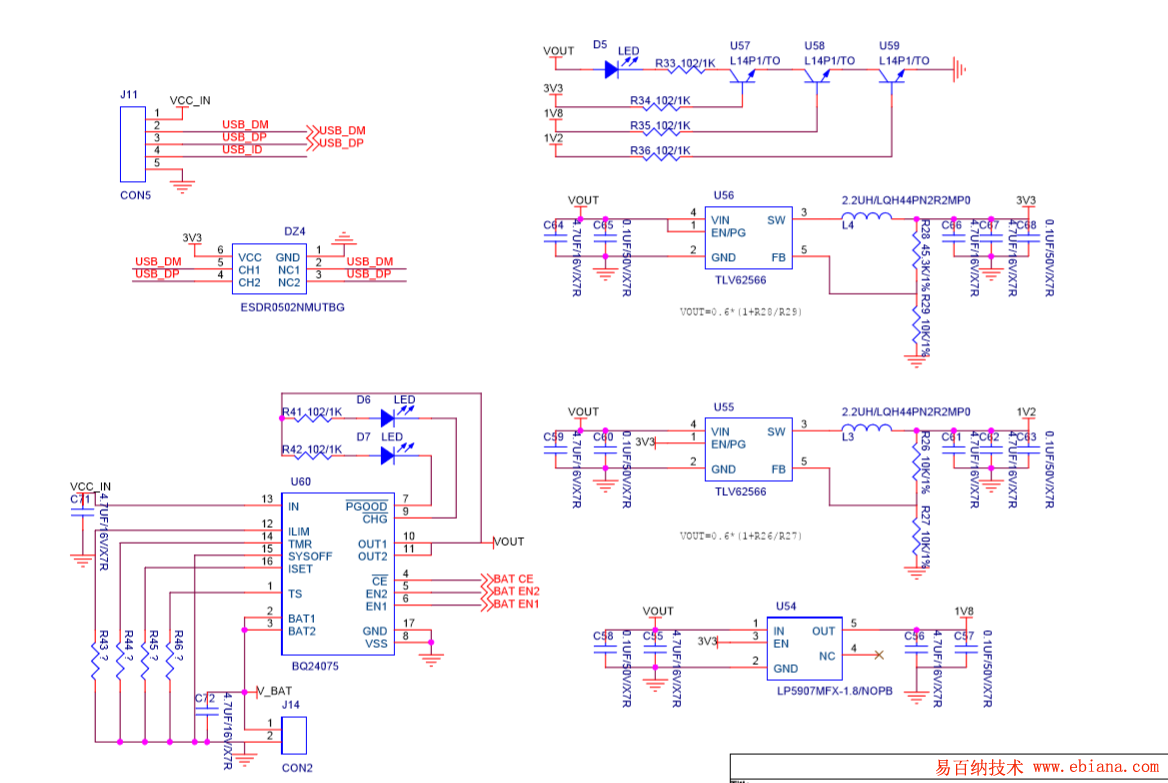
插上电源,VCC IN正常时D7亮,VOUT有输出,板子上电。对电池充电时D6亮,充满自动熄灭。
J14接电池,BAT CE控制是否充电,BAT EN1和BAT EN2控制电流,这三个信号都由是CPU的GPIO直接控制。
拔掉电源,电池通过充电芯片输出电压到VOUT对系统供电。电池的正极经过1/2分压后接到CPU的ADC输入口来监控电池电量。
系统3.3V和1.2V由DC/DC产生,芯片选的有些大了,有点浪费,实际用不到那么大的电流。1.8V由LDO产生。
2.CPU
CPU部分就没什么可说的了,芯片选用的就是N32926U1DN
3.MEMORY
板子上带一片SPI FLASH和一片EEPROM,具体用多大容量的等样板回来再定,板载一个TF/Micro SD卡座,卡可以热插拔。
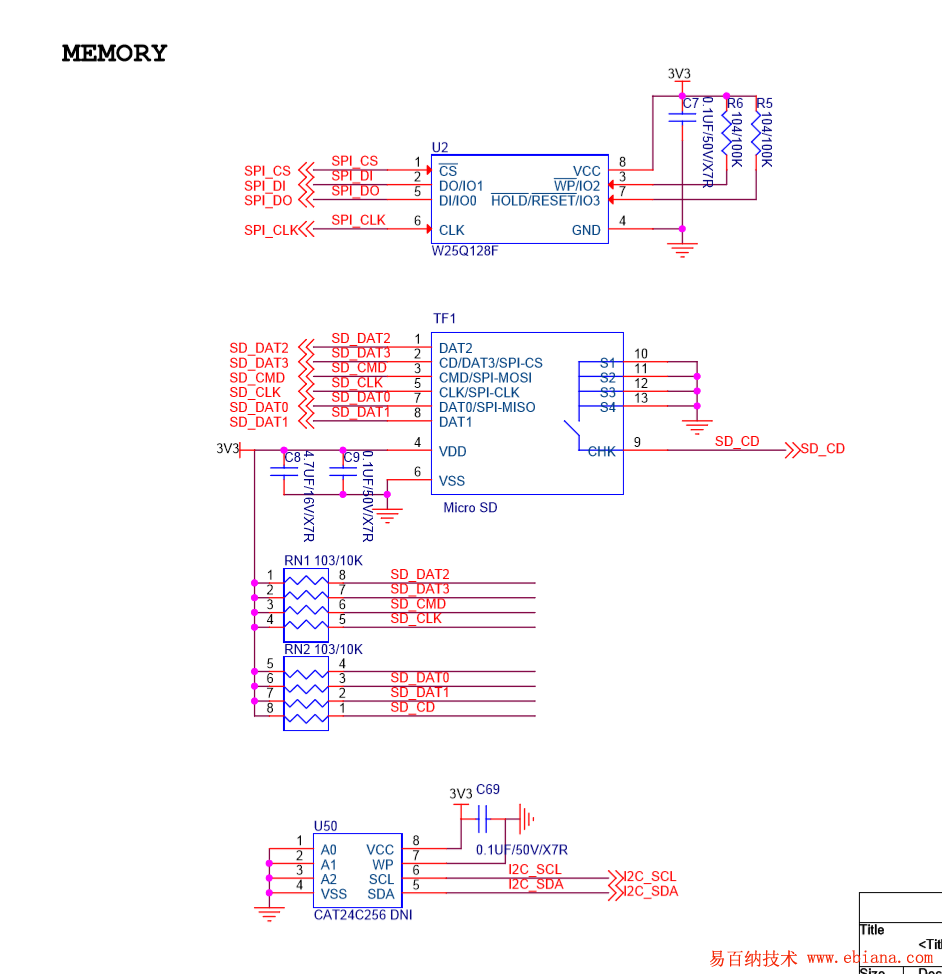
接口都是标准接口,不多说了。图中的TF卡还没有加静电保护,加了才可以热插拔。
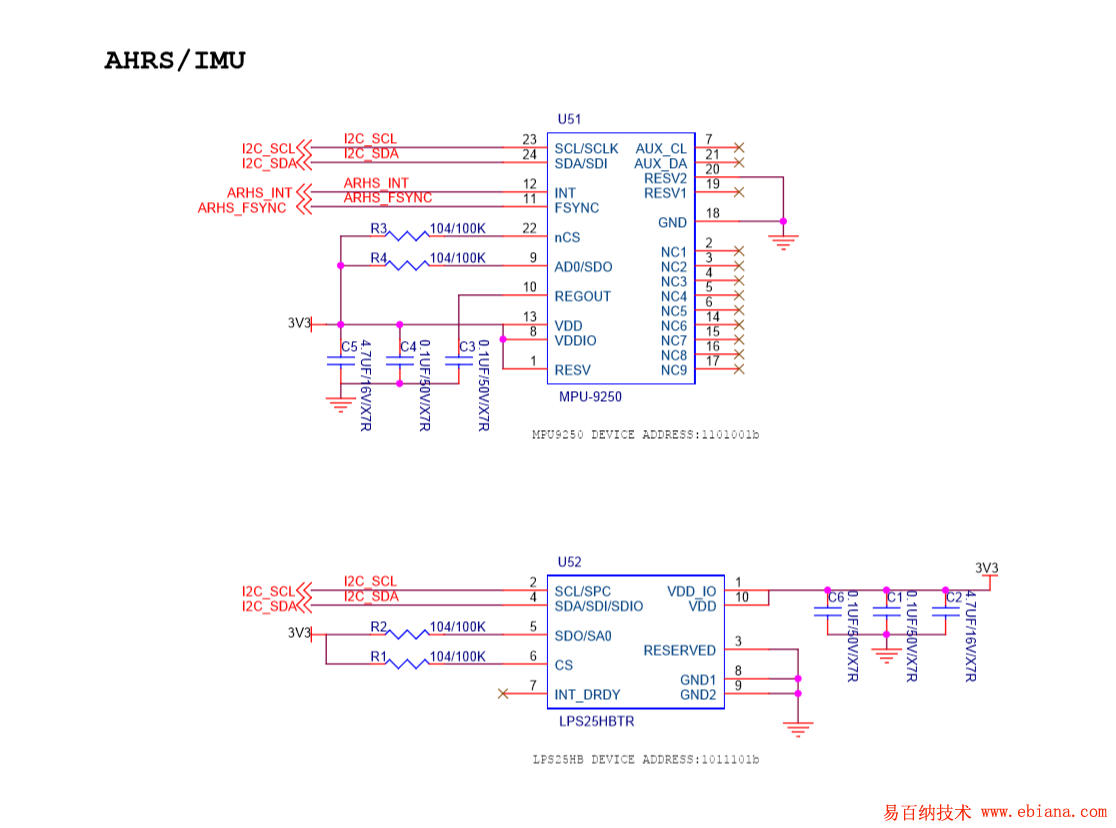
4.AHRS/IMU
四轴传感器部分选用MPU9250和LPS25HBTR。
MPU9250是个9轴传感器:3轴陀螺仪,3轴加速度,3轴磁阻。画板时可能会换成MPU6050,这个是6轴传感器:3轴陀螺仪,3轴加速度。磁阻传感器在飞行中一般只是辅助作用,具体用哪个就看哪个好采购了。
LPS25HBTR是气压传感器,可以测高度,意义不是太大,小四轴一般都在室内飞,这款传感器测高度时分辨率好像在10米左右。罗姆有一款传感器分辨率在10厘米左右,不好买,据说这几个月已才开始出货,有渠道的可以问问看。
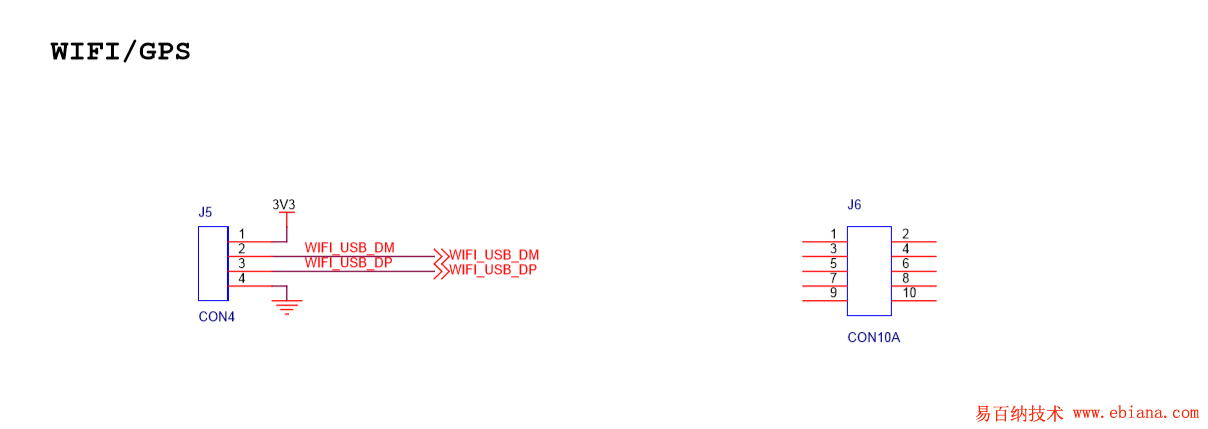
5.WIFI/GPS
WIFI直接用RTL8188的USB接口WIFI模块,模块自带天线。
GPS只在图里放了个端子,具体接线没画,UART接口控制的。模块体积有点大可能画板子时会去掉。
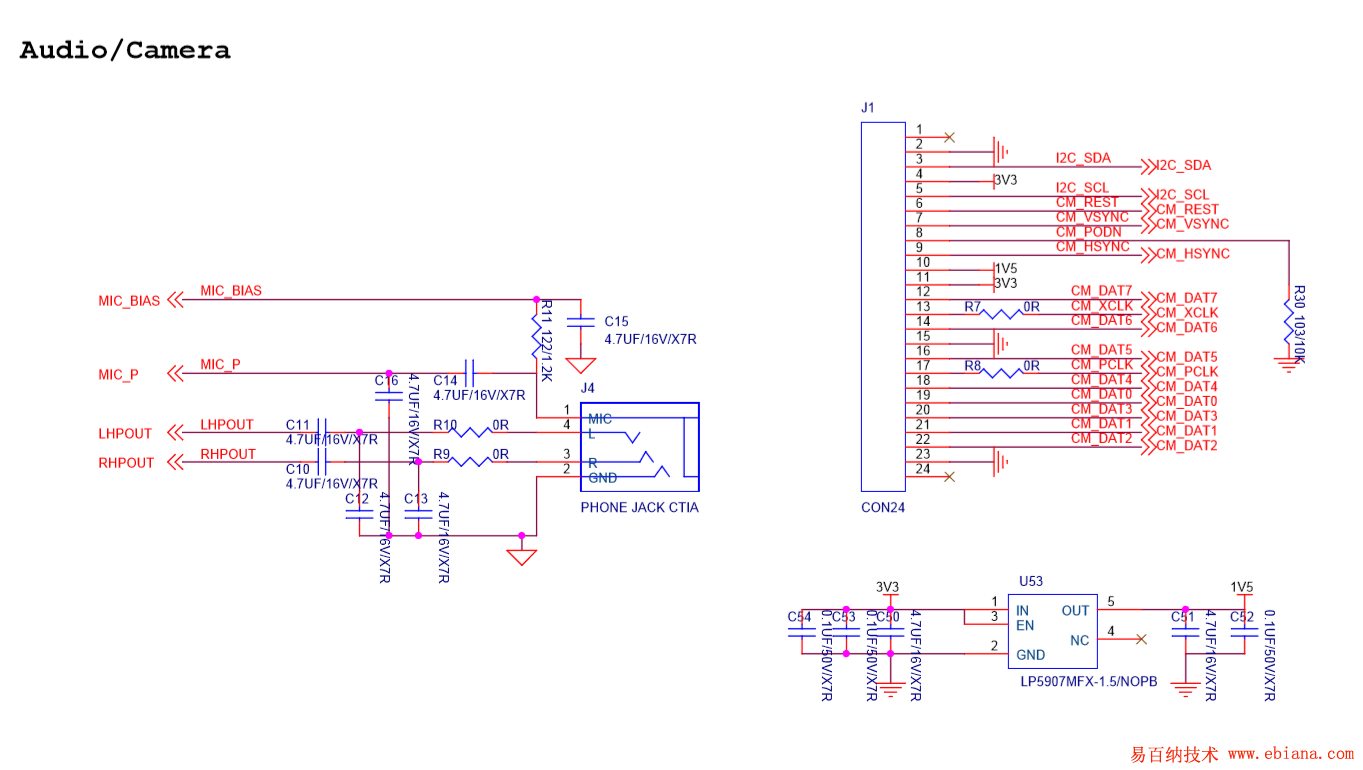
6.Audio/Camera
音频的输入输出用CPU自带的ADC和DAC,接口用4段的3.5耳机座,CTIA标准的手机耳机可以直接插上用,3.5的手机耳机另一种标准是OMTP,两种的差别就是插头上MIC和GND的线序不一样,网上有转接线卖的。
Camera的COMS用的是NT99141,百度一下就有手册的。
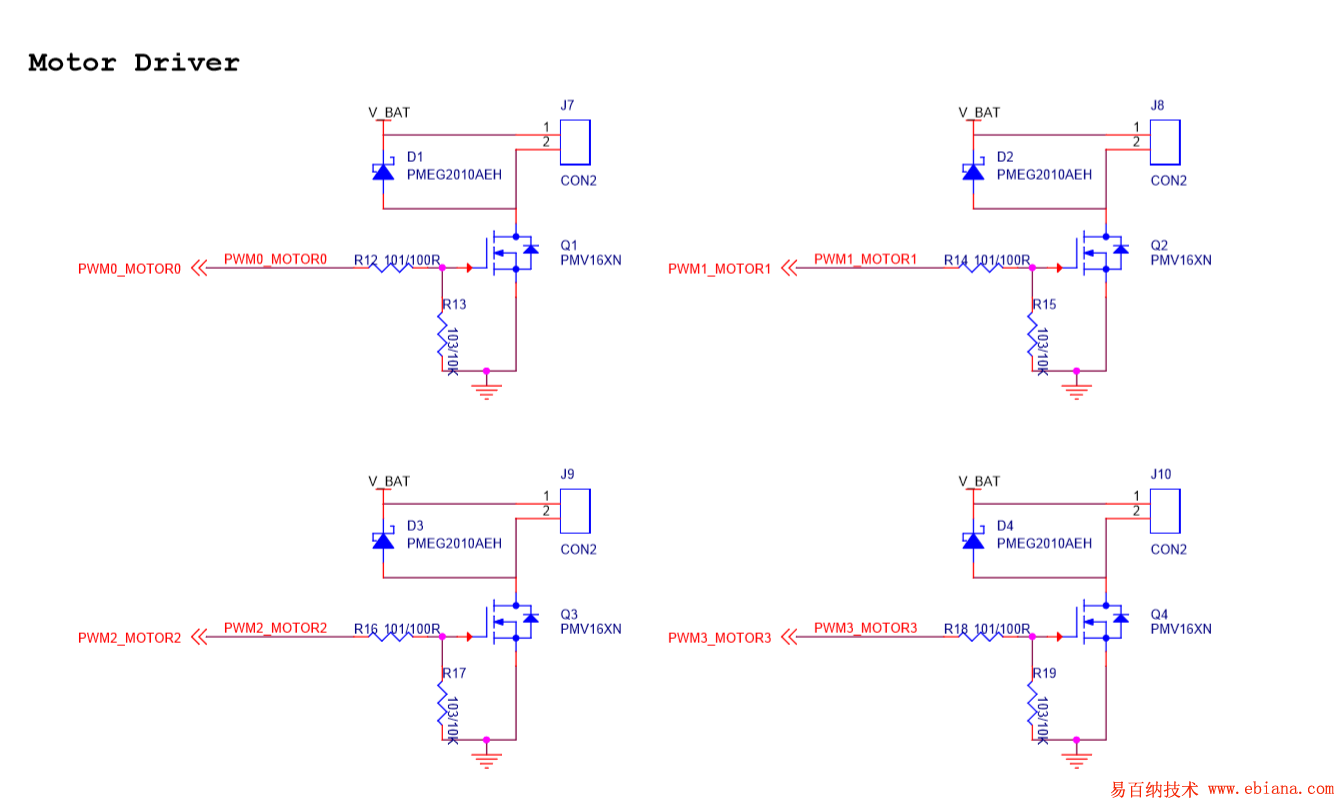
7.Motor Driver
四轴的电机直接用电池供电,MOS管驱动,CPU刚好可以输出四路PWM来控制MOS管。图里的MOS管25度时可通过6.8A电流,100度时4.3A。目前电机和螺旋桨还没选,这两个定了后才能最终确定MOS管的型号。
每路MOS管都加了下拉电阻防止上电时电机不受控。电机产生的反电动势用二极管吸收。
**********************************************************************************************************************************************************************************
原理图导出PDF时顺序乱了,家里没有导PDF的软件,明天去公司重新导出再传上来。
原理图目前已基本做好,细节部分还没有仔细处理,先放出来让大家看看,并简单介绍下原理。
1.电源
板子引出一路USB口,采用Micro USB母座,就是一般手机充电的那种USB口,该接口同时也是板子的供电接口,大家直接用自己的手机充电器或者直接用电脑的USB口就可以对板子供电了,板子不再另配电源适配器。
锂电池的接口还没想好用哪种,最有可能的是可以直接插航模电池那种,这个到画板子时在确定吧。
板载锂电池充电芯片BQ24075(TI),该芯片可以在充电的同时对系统供电,只能充单节的电池,多节并一起或串一起的不可充。
插上电源,VCC IN正常时D7亮,VOUT有输出,板子上电。对电池充电时D6亮,充满自动熄灭。
J14接电池,BAT CE控制是否充电,BAT EN1和BAT EN2控制电流,这三个信号都由是CPU的GPIO直接控制。
拔掉电源,电池通过充电芯片输出电压到VOUT对系统供电。电池的正极经过1/2分压后接到CPU的ADC输入口来监控电池电量。
系统3.3V和1.2V由DC/DC产生,芯片选的有些大了,有点浪费,实际用不到那么大的电流。1.8V由LDO产生。
2.CPU
CPU部分就没什么可说的了,芯片选用的就是N32926U1DN
3.MEMORY
板子上带一片SPI FLASH和一片EEPROM,具体用多大容量的等样板回来再定,板载一个TF/Micro SD卡座,卡可以热插拔。
接口都是标准接口,不多说了。图中的TF卡还没有加静电保护,加了才可以热插拔。
4.AHRS/IMU
四轴传感器部分选用MPU9250和LPS25HBTR。
MPU9250是个9轴传感器:3轴陀螺仪,3轴加速度,3轴磁阻。画板时可能会换成MPU6050,这个是6轴传感器:3轴陀螺仪,3轴加速度。磁阻传感器在飞行中一般只是辅助作用,具体用哪个就看哪个好采购了。
LPS25HBTR是气压传感器,可以测高度,意义不是太大,小四轴一般都在室内飞,这款传感器测高度时分辨率好像在10米左右。罗姆有一款传感器分辨率在10厘米左右,不好买,据说这几个月已才开始出货,有渠道的可以问问看。
5.WIFI/GPS
WIFI直接用RTL8188的USB接口WIFI模块,模块自带天线。
GPS只在图里放了个端子,具体接线没画,UART接口控制的。模块体积有点大可能画板子时会去掉。
6.Audio/Camera
音频的输入输出用CPU自带的ADC和DAC,接口用4段的3.5耳机座,CTIA标准的手机耳机可以直接插上用,3.5的手机耳机另一种标准是OMTP,两种的差别就是插头上MIC和GND的线序不一样,网上有转接线卖的。
Camera的COMS用的是NT99141,百度一下就有手册的。
7.Motor Driver
四轴的电机直接用电池供电,MOS管驱动,CPU刚好可以输出四路PWM来控制MOS管。图里的MOS管25度时可通过6.8A电流,100度时4.3A。目前电机和螺旋桨还没选,这两个定了后才能最终确定MOS管的型号。
每路MOS管都加了下拉电阻防止上电时电机不受控。电机产生的反电动势用二极管吸收。
**********************************************************************************************************************************************************************************
原理图导出PDF时顺序乱了,家里没有导PDF的软件,明天去公司重新导出再传上来。
我来回答
回答36个
时间排序
认可量排序
认可0
认可0
认可0
认可0
认可0
认可0
认可0
认可0
认可0
认可0
认可0
认可0
认可0
认可0
认可0
认可0
认可0
认可0
认可0
认可0
加载中···
或将文件直接拖到这里
悬赏:
E币
网盘
* 网盘链接:
* 提取码:
悬赏:
E币
Markdown 语法
- 加粗**内容**
- 斜体*内容*
- 删除线~~内容~~
- 引用> 引用内容
- 代码`代码`
- 代码块```编程语言↵代码```
- 链接[链接标题](url)
- 无序列表- 内容
- 有序列表1. 内容
- 缩进内容
- 图片
相关问答
-
172015-09-12 16:27:15
-
2015-09-17 11:58:51
-
2013-06-27 22:34:29
-
2016-03-01 14:00:15
-
372012-11-29 20:59:20
-
2019-01-10 14:12:37
-
2019-07-21 17:25:30
-
2016-01-14 21:36:16
-
2019-01-17 09:57:48
-
102015-11-02 22:22:21
-
2018-08-25 09:33:23
-
2013-06-24 10:16:37
-
2015-07-27 11:46:35
-
222012-11-24 15:16:58
-
242016-01-16 14:36:44
-
2013-06-24 10:10:34
-
2019-04-25 15:37:44
-
2013-06-24 09:55:31
-
2013-11-22 16:22:12
无更多相似问答 去提问
点击登录
-- 积分
-- E币
提问
—
收益
—
被采纳
—
我要提问
切换马甲
上一页
下一页
悬赏问答
-
5SS928的emmc有32GB,bootargs设置使用16GB,但是为啥能用的只有rootfs的大小
-
33SS928怎样烧写ubuntu系统
-
10ToolPlatform下载rootfs提示网络失败
-
10谁有GK7205V500的SDK
-
5Hi3516CV610 烧录不进去
-
10Hi3559AV100 芯片硬解码h265编码格式的视频时出现视频播放错误,解码错误信息 s32PackErr:码流有错
-
5海思SS928 / SD3403的sample_venc.c摄像头编码Demo中,采集到的摄像头的YUV数据在哪个相关的函数中?
-
5海鸥派openEuler无法启动网卡,连接WIFI存在问题
-
66有没有ISP相关的巨佬帮忙看看SS928对接IMX347的图像问题
-
50求助hi3559与FPGA通过SLVS-EC接口对接问题
举报反馈
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
提醒
你的问题还没有最佳答案,是否结题,结题后将扣除20%的悬赏金
取消
确认
提醒
你的问题还没有最佳答案,是否结题,结题后将根据回答情况扣除相应悬赏金(1回答=1E币)
取消
确认


关注公众号
联系我们
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
回顶部
