

用于机器人和自主系统的多摄像头差分双目视觉传感器

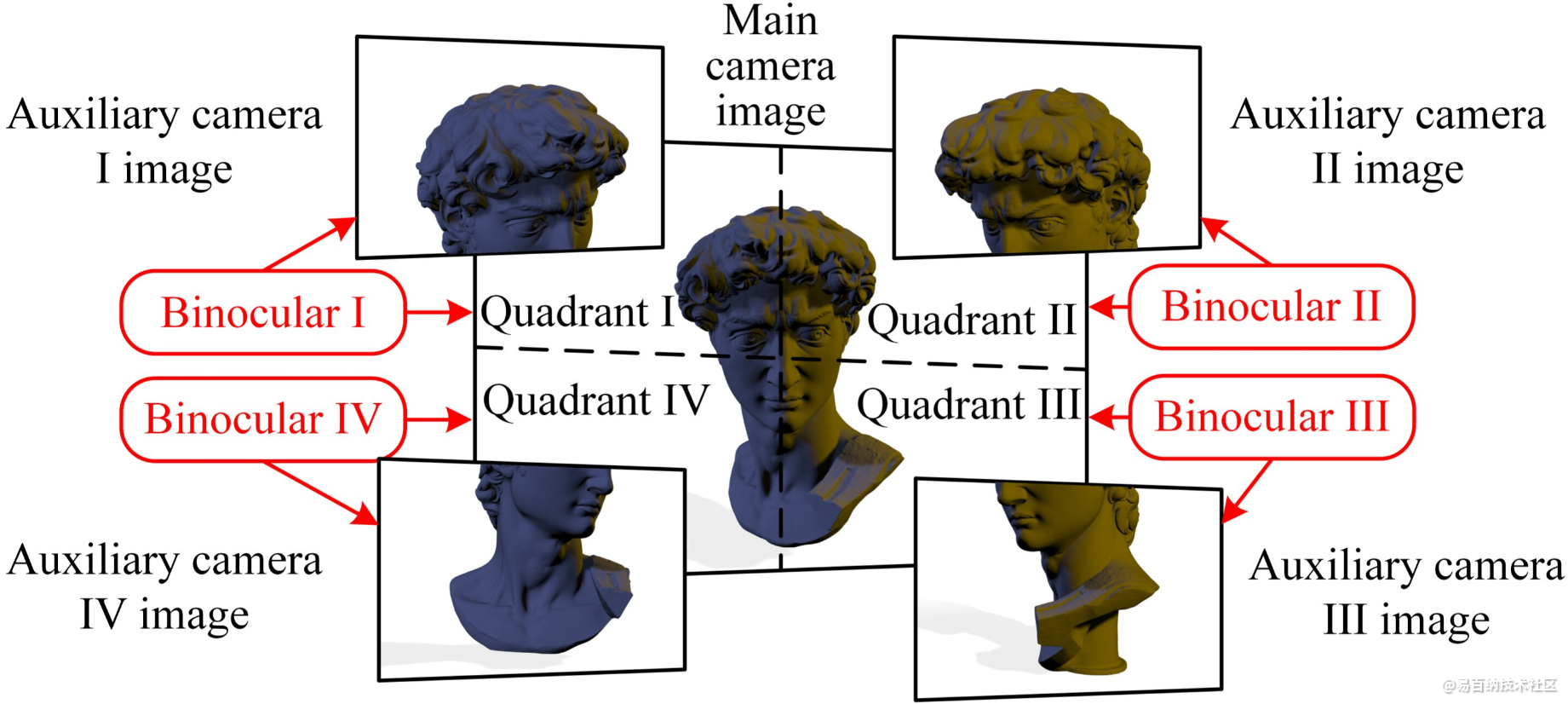
图中总结了传感器的原理
最近的技术进步使越来越复杂的传感器得以发展,这有助于提高机器人、无人机、自动驾驶汽车和其他智能系统的传感能力。然而,这些传感器中的许多都依赖于单独的摄像机,因此它们收集的测量结果的准确性受到摄像机视场(FOV)的限制。
北京航空航天大学的研究人员最近开发了一种新的多摄像头差分双目视觉传感器,具有更宽的视场,可以收集更精确的测量数据。发表在《光学与激光技术》杂志上的一篇论文介绍了这种传感器,它可以集成到各种设备和智能机器人系统中。
“针对无人机检测、机器人导航和自动驾驶对环境感知的高精度要求,受手机多摄像头模块的启发,我们引入了一种基于高精度双目视觉测量原理的视觉感知模式,”该论文的合著者Fuqiang Zhou说。“这个原理涉及到一个中央高分辨率摄像头和外围辅助摄像头的协同工作。”
周和他的同事们最近研究的主要目标是开发一种具有更宽视场的传感器。通过使用多个摄像头,并以一种战略性的方式放置它们,他们开始实现一个协调系统,该系统将比传统的基于单个摄像头的传感器收集更精确的测量数据。
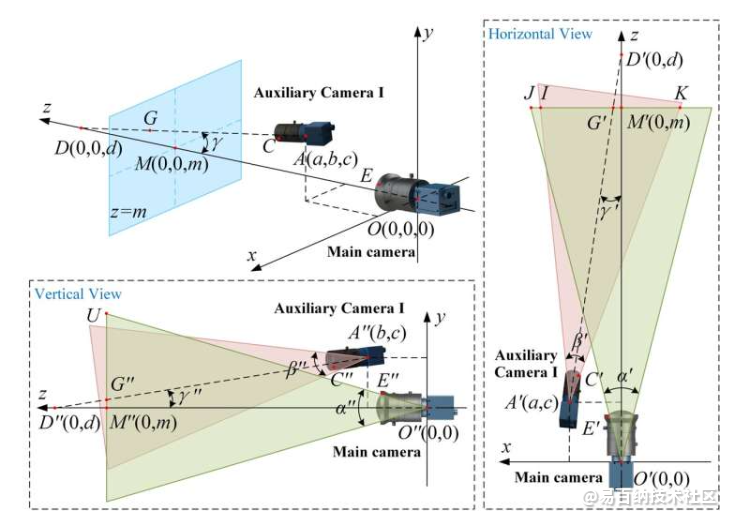
支撑传感器设计的结构
“我们的多摄像头差分双目视觉传感器由一个中央主摄像头和四个外围辅助摄像头组成,”周解释说。“主摄像头的四个象限图像与四个辅助摄像头图像形成四对双筒望远镜。传感器的结构参数从空间排列、测量范围、精度等方面进行优化,采集高精度三维测量数据。
周和他的同事在一系列实验中测试了他们开发的传感器,发现其FOV明显比传统的双目相机宽。通过组合多个摄像头的视场,传感器可以收集周围环境的更精确测量值。
“所提出的传感器比其他视觉测量方法具有更高的测量精度,特别是与相同的多相机测量方法相比,它减少了相机的数量,同时提高了测量精度,”周说。
未来,该团队开发的传感器可以集成到各种系统中,包括半自动或自动驾驶汽车、机器人和运动传感设备。这将使研究人员能够在现实世界中验证其性能,并进一步调整他们的设计以促进其未来的商业化。
“在视觉测量领域,双筒望远镜是高精度的最 佳选择,”周补充道。“基于所提出的原理和思想,实现了大视场的高精度视觉感知。随着小型工业相机和结构设计的结合,进一步实现小型化和轻量化,该传感器可能成为未来智能无人系统中类似于LiDAR的标准配置。
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:4065次2019-07-05 11:12:50
-
浏览量:2471次2020-06-18 15:09:16
-
浏览量:1314次2023-12-13 14:01:46
-
浏览量:1654次2023-08-24 13:51:18
-
浏览量:1018次2023-12-04 09:35:44
-
浏览量:1601次2019-09-12 14:00:08
-
浏览量:2275次2019-11-01 14:57:29
-
浏览量:3787次2022-01-11 09:00:17
-
浏览量:2876次2019-11-18 09:23:04
-
浏览量:3473次2020-02-25 18:18:11
-
浏览量:1701次2023-03-20 10:56:09
-
浏览量:3382次2020-10-20 15:40:55
-
浏览量:2435次2018-03-23 14:25:17
-
浏览量:2371次2019-11-07 14:15:02
-
浏览量:17805次2020-12-05 09:32:54
-
浏览量:4597次2022-02-22 09:01:56
-
浏览量:1974次2019-11-15 08:47:19
-
浏览量:2956次2020-07-30 09:14:09
-
浏览量:1837次2023-04-23 09:38:45






-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
艾

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
