

基于瑞芯微平台cif接口dvp相机的视频接入(ov2640、rv1126为例)

名词定义
CIF,指RK芯片中的VIP模块,用以接收Sensor数据并保存到Memory中,仅转存数据,无ISP功能
DVP,一种并行数据传输接口,即Digital Video Port
HSYNC,指DVP接口的行同步信号
PCLK,指Sensor输出Pixel Clock
VSYNC,指DVP接口的场同步信号
V4L2,即Video4Linux2,Linux kernel的视频处理模块
视频格式
视频格式一般分成BT1120(BT656)和BT601两种。
BT1120视频数据只支持内同步。信号内同步的意思是图像数据和同步信号均包含在图像数据中,通过关键字恢复同步信号。可以参考我的另一篇博客SDI视频数据流格式简介
BT601协议采用外同步,外同步是指图像数据和同步数据(HS、VS、DE)单独传送。
因为内同步是将图像与同步信号一起传送,因此会有同步分离机制,所以亮度及色彩不可能全编码,以8BIT为例,可以传送的范围为0-255,但内同步一起传送,实际编码不可能有256范围,在ITU-656中大多采用16-235,而ITU-601因为采用外同步,可以传送0-255 范围的数据。因此,内同步的色采及亮度在细节上没有内同步好。但是,在串行编码及低带宽传送中,内同步可以减少数据流,因此,通过内同步传送图像虽然色彩有一定的损失,但可以换来更低的带宽。
视频格式一般在视频的驱动程序中进行设置,只有以下两种格式:
config->type = V4L2_MBUS_BT656;//BT1120 BT656
config->type = V4L2_MBUS_PARALLEL;//BT601
- 1
- 2
一般BT601使用较多,外同步信号,需要配合行场同步信号。
sensor与isp
sensor与isp之间的关系图一般如下所示:
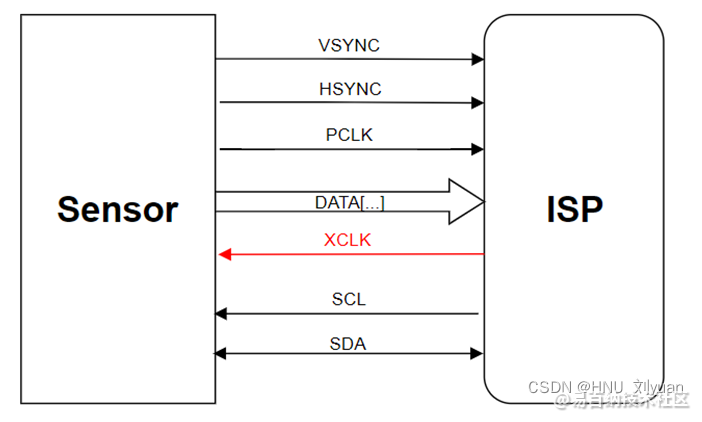
首先ISP也就是ARM芯片端,需要通过I2C总线对sensor进行配置,主要通过SCL(时钟线)和SDA(数据线)对sensor的寄存器进行配置,可以决定sensor的分辨率、输出视频格式(rgb、yuv)、白平衡等进行设置。
部分摄像头可能不含晶振,比如OV7670,所以就需要ISP提供相机时钟,也就是XCLK进行驱动,一般在24MHz左右。部分带有晶振的相机,比如OV2640,由于集成了晶振,所以无需进行外部时钟驱动。
VS、HS和PCLK是sensor输出的行场同步信号和像素时钟。
DATA是sensor输出的像素值,一般8位较多。
然后对以上的各个部分进行介绍。
I2C
由于ARM芯片具有较多的I2C引脚,比如RV1126好像就有5个I2C引脚。每一个相机的I2C都要连接到对应的引脚上,以正点原子的RV1126开发板为例,I2C就挂载到了I2C1下: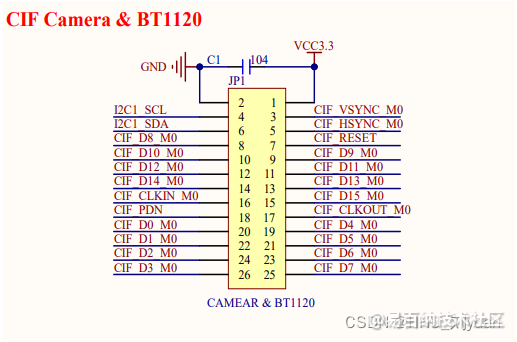
在设备树dts中,就要把OV2640的摄像头节点放在I2C1下,比如:
&i2c1 {
status = "okay";
clock-frequency = <100000>;
ov2640: camera@3c {
compatible = "ovti,ov2640";
pinctrl-names = "default";
reg = <0x3c>;
......
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
摄像头所支持的I2C时钟速度最快可达到400Kbps,同时每一款摄像头都有专属的地址,比如ov2640的地址是0x3c,注意地址是硬件设计死的无法更改。
I2C设备可以使用i2cdetect工具进行调试,比如查看i2c1下挂载了哪些设备,可以通过以下命令进行查看:
i2cdetect -y 1
- 1
若我在0x21处挂载了设备,将得到: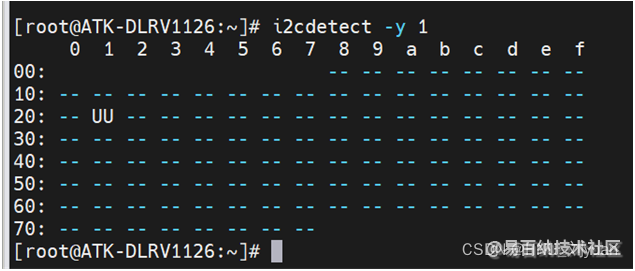
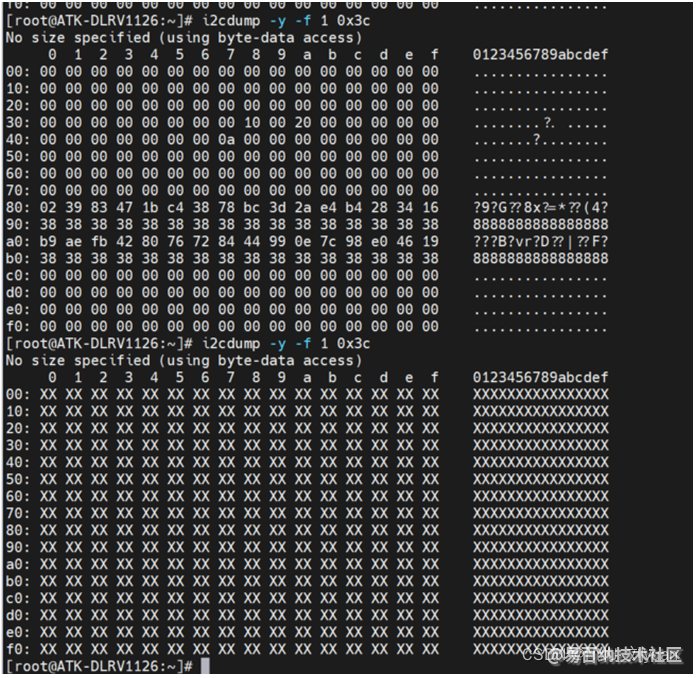
同时可以使用以下命令查看i2c寄存器中的值,比如我要查看i2c1下地址为0x3c处寄存器的值,可以通过以下名称查看:
i2cdump -y -f 1 0x3c
- 1
值得注意的是有些摄像头将power_down拉低后,开发板才能够通过i2c与相机寄存器之间进行通信,比如上方为拉低了的,下方为未拉低。
另:OV公司的I2C不是标准的I2C总线,为了避开专利,他们采用的是SCCB总线技术,不过经过测试与I2C区别不大。
SCCB是欧姆尼图像技术公司(OmniVision)开发的一种总线,应用于OV系列图像传感器上。SCCB最主要是阉 割了IIC的连续读写的功能,即每读写完一个字节就主机必须发送一个NA信号。
XCLK
部分不带晶振的摄像头需要提供XCLK像素时钟进行驱动,在设备树中可以通过以下进行添加,注意时钟名字要与驱动对应:
比如设备树中可能如下:
clocks = <&cru CLK_CIF_OUT>;
clock-names = "xvclk";
- 1
- 2
驱动部分对应如下:
priv->clk = v4l2_clk_get(&client->dev, "xvclk");
if (IS_ERR(priv->clk))
return -EPROBE_DEFER;
- 1
- 2
- 3
行场同步信号
不同相机的行场同步信号可能不同,具体可以查询芯片手册,不过注意的是芯片手册不一定准确,比如OV2640,芯片手册的时序为: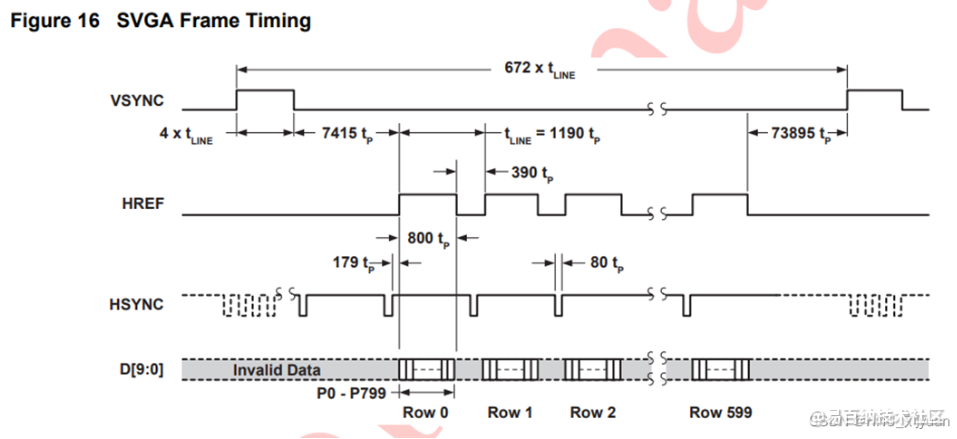
可以看出是标准的SDI格式,也就是当DE也就是HREF为高时,VSYNC为低,VSYNC只在有效像素前产生一段高电平。但是按照这个时序产生的同步信号始终无法抓取到图像,经过抓取之后发现OV2640输出的时序如下:
可以看出当DE为高时,也就是有效像素部分,VS也为高,基本与手册中写的相反,按照上面的时序即可抓取到图像。
正确OV2640时序的Verilog代码如下,注意分辨率为800x600,YUYV格式8bit:
parameter ROWS = 600;
parameter COLS = 1600;
parameter ROWS_TOTAL = 672;
parameter COLS_TOTAL = 3840;
parameter ROW_START = 36;
parameter COL_START = 1000;
reg [12:0] rROW;
reg [12:0] rCOL;
always@(posedge wCLK18M)
begin
if(!iRst)
begin
rROW <= 0;
rCOL <= 0;
end
else
begin
if(rCOL==COLS_TOTAL-1)
begin
rCOL <= 0;
rROW <= rROW + 1;
end
else
begin
rCOL <= rCOL + 1;
end
if(rROW == ROWS_TOTAL)
begin
rROW <= 0;
end
end
end
reg r2640DE;
reg r2640VS;
reg [7:0] r2640H;
always@(posedge wCLK18M)
begin
if(rROW >= ROW_START && rROW < (ROW_START + ROWS))
begin
r2640VS <= 1;
if(rCOL >= COL_START && rCOL < (COL_START + COLS))
begin
r2640DE <= 1;
end
else
begin
r2640DE <= 0;
end
end
else
begin
r2640VS <= 0;
end
end
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
生成的波形如下: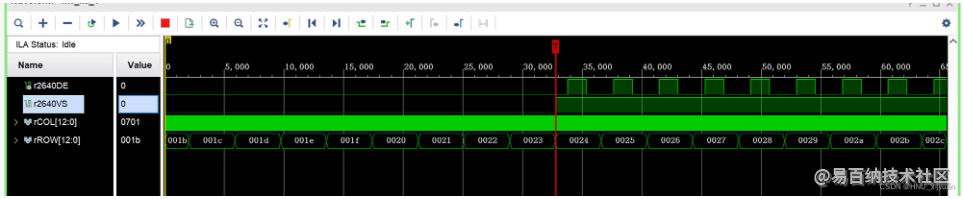
同时也要注意HS和VS的极性,也就是有效时的电平高低,主要收到设备树和驱动的控制,设备树部分如下:
&i2c1 {
status = "okay";
// clock-frequency = <400000>;
clock-frequency = <100000>;
ov2640: camera@3c {
compatible = "ovti,ov2640";
pinctrl-names = "default";
pinctrl-0 = <&cifm1_dvp_ctl>;
reg = <0x3c>;
clocks = <&cru CLK_CIF_OUT>;
clock-names = "xvclk";
port {
/* Parallel bus endpoint */
cam_para_out1: endpoint {
remote-endpoint = <&cif_para_in>;
bus-width = <8>;
//data-shift = <2>; /* lines 9:2 are used */
hsync-active = <1>;
vsync-active = <1>;//<1>;
pclk-sample = <1>;
};
};
};
};
&rkcif_dvp {
status = "okay";
port {
cif_para_in: endpoint {
remote-endpoint = <&cam_para_out1>;
bus-width = <8>;
hsync-active = <1>;
vsync-active = <1>;
};
};
};
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
驱动部分:
config->flags = V4L2_MBUS_PCLK_SAMPLE_RISING | V4L2_MBUS_MASTER |
V4L2_MBUS_VSYNC_ACTIVE_HIGH | V4L2_MBUS_HSYNC_ACTIVE_HIGH |
V4L2_MBUS_DATA_ACTIVE_HIGH;
- 1
- 2
- 3
两者要与实际情况相匹配。
DATA
sensor输出的数据一般8位居多,也有16位和10位的,RV1126的CIF接口输入如下:
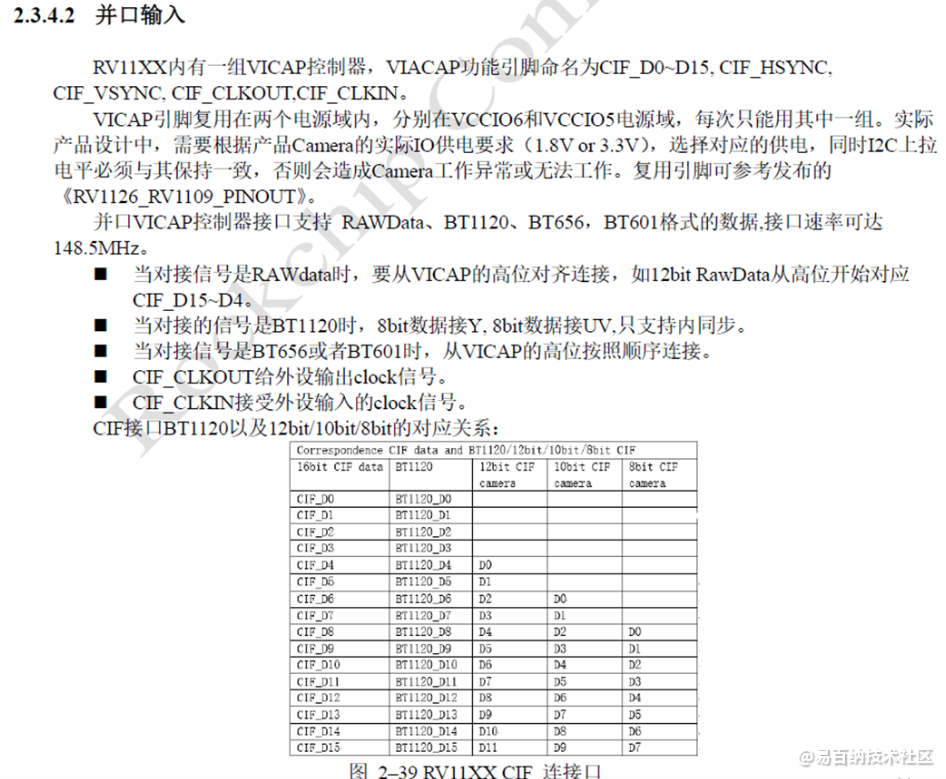
优先使用CIF接口的高位进行传输。
同时还要对MEDIA_BUS_FMT进行配置,与sensor输出的像素格式对应,可以参考V4L2的手册,格式十分丰富。
以OV2640为例支持以下的格式:
static u32 ov2640_codes[] = {
MEDIA_BUS_FMT_YUYV8_2X8,
MEDIA_BUS_FMT_UYVY8_2X8,
MEDIA_BUS_FMT_YVYU8_2X8,
MEDIA_BUS_FMT_VYUY8_2X8,
MEDIA_BUS_FMT_RGB565_2X8_BE,
MEDIA_BUS_FMT_RGB565_2X8_LE,
};
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
以MEDIA_BUS_FMT_YUYV8_2X8为例,视频输出的格式位YUYV,并且深度是8bit色深,每次只传输8bit,两个像素周期才是一个完整的像素。
抓图
抓图一般使用v4l2-ctl进行抓图,对于dvp接口可以在video0进行抓图,对于mipi则不行,抓图实例如下:
v4l2-ctl -d /dev/video0 --set-fmt-video=width=800,height=600,pixelformat=YUYV8_2X8--stream-mmap=3 --stream-skip=3 --stream-to=./cif.out --stream-count=1 --stream-poll
- 1
抓图成功一般如下所示,会有 < 打印输出: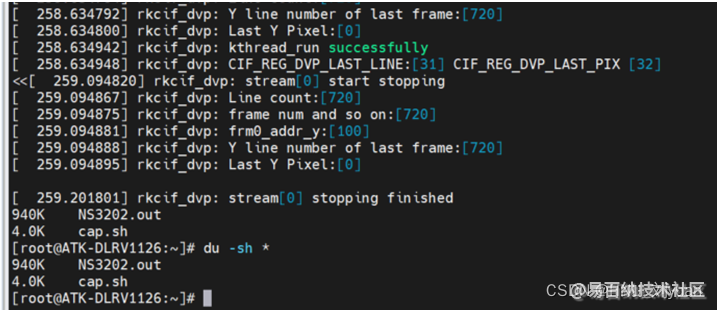
并且对于800x600大小YUYV8_2X8格式的图片一般占用940k存储空间。
并且可以通过以下python代码查看像素值:
yuv = "./pic.out"
with open(yuv, "rb") as yuv_f:
yuv_bytes = yuv_f.read()
yuv_data = np.frombuffer(yuv_bytes, np.uint8)
- 1
- 2
- 3
- 4
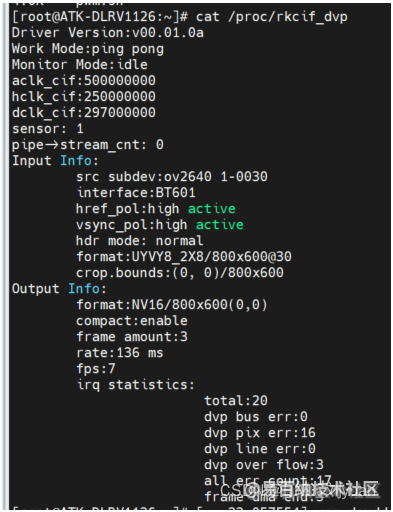
同时在/proc路径下也会有统计信息得到保存,通过以下命令进行查看:
cat /proc/rkcif_dvp
- 1
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:2797次2023-11-17 10:55:31
-
浏览量:10901次2024-01-04 14:35:55
-
浏览量:3169次2023-08-29 13:13:38
-
浏览量:4218次2021-04-02 09:47:41
-
浏览量:1658次2024-05-24 17:11:01
-
浏览量:1631次2024-05-24 17:28:44
-
浏览量:6407次2022-05-11 15:14:51
-
浏览量:2387次2024-05-24 17:53:56
-
浏览量:1785次2024-05-24 19:05:42
-
浏览量:1858次2024-05-24 18:51:13
-
浏览量:2329次2023-08-08 13:59:23
-
浏览量:4863次2021-03-30 17:33:20
-
浏览量:5756次2021-04-01 16:24:41
-
浏览量:6812次2022-05-31 11:14:16
-
浏览量:7288次2021-04-01 17:04:01
-
浏览量:6124次2021-04-01 16:47:04
-
浏览量:2574次2022-10-09 10:38:23
-
浏览量:4166次2021-04-01 13:54:47
-
浏览量:4362次2021-06-18 16:05:42

Mrs Wu
暂无个性签名~








-
17篇
-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
Mrs Wu

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
