

为机器人运动而开发的柔软人造肌肉

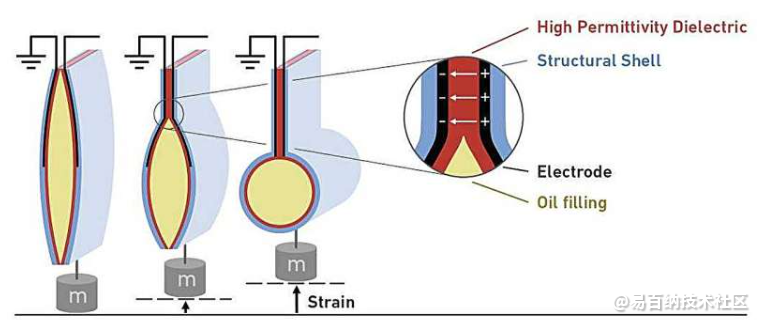
该图显示了人造肌肉的工作原理以及新外壳的结构
苏黎世联邦理工学院的研究人员最近开发了用于机器人运动的人造肌肉。与以前的技术相比,他们的解决方案有几个优势:它可以用于机器人需要柔软而不是刚性的地方,也可以用于机器人在与环境互动时需要更敏感的地方。
许多机器人专家梦想制造的机器人不仅是金属或其他坚硬材料与马达的组合,而且更柔软,适应性更强。
软机器人可以以一种完全不同的方式与环境互动;例如,它们可以像人类的四肢一样缓冲冲击,或者巧妙地抓住物体。这也将在能源消耗方面带来好处;今天的机器人运动通常需要大量的能量来保持一个位置,而软系统也可以很好地储存能量。那么,还有什么比以人体肌肉为模型并试图重建它更明显的呢?
因此,人造肌肉的功能是基于生物学的。和天然肌肉一样,人造肌肉也会因电脉冲而收缩。然而,人造肌肉不是由细胞和纤维组成的,而是由一个装满液体(通常是油)的袋子组成的,袋子的外壳部分覆盖着电极。
当这些电极接收到电压时,它们会聚集在一起,将液体推入袋子的其余部分,袋子会弯曲,从而能够举起重物。单个眼袋类似于一小束肌肉纤维;其中几个可以连接起来形成一个完整的推进元件,也被称为执行器或简单地称为人造肌肉。

开发人造肌肉的想法并不新鲜,但到目前为止,实现它一直存在一个主要障碍:静电致动器只能在6000至10000伏左右的极高电压下工作。这一要求产生了若干后果;例如,肌肉必须连接到大而重的电压放大器;它们不在水中工作;它们对人类来说并不完全安全。
苏黎世联邦理工学院机器人学教授Robert Katzschmann与Stephan Daniel Gravert、Elia Varini及其同事共同开发了一种新的解决方案。他们在《科学进展》杂志上发表了他们的人造肌肉版本,该版本提供了几个优势。
格拉威是卡兹曼实验室的一名科学助理,他为这个袋子设计了一个外壳。研究人员称这种新型人造肌肉为HALVE致动器,HALVE代表“液压放大低压静电”。
“在其他致动器中,电极位于外壳的外侧。在我们的致动器中,外壳由不同的层组成。我们采用了一种高介电常数铁电材料,即一种可以储存相对大量电能的材料,并将其与一层电极相结合。接下来,我们在其上涂上一层聚合物外壳,该外壳具有优异的机械性能,使袋子更加稳定。”Gravert解释说。
这意味着研究人员可以降低所需的电压,因为铁电材料的介电常数高得多,尽管电压较低,但仍能产生较大的力。Gravert和Varini不仅共同开发了HALVE执行器的外壳,而且他们还在实验室中自己制造了用于两个机器人的执行器。
其中一个机器人的例子是一个11厘米高,有两个手指的抓手。每个手指由三个串联的halfve执行器移动。一个小型电池供电的电源为机器人提供900伏的电压。
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:968次2023-11-13 14:18:58
-
浏览量:1110次2023-03-09 16:59:13
-
浏览量:1727次2023-03-23 10:43:10
-
浏览量:1404次2023-11-23 11:34:37
-
浏览量:2851次2018-01-06 21:01:01
-
浏览量:4022次2018-01-16 12:27:50
-
2023-04-14 13:44:09
-
浏览量:2083次2020-04-24 10:38:46
-
浏览量:3225次2020-11-18 14:34:59
-
浏览量:1024次2023-03-14 13:50:59
-
浏览量:2216次2018-03-21 14:56:35
-
浏览量:2531次2018-01-27 17:28:13
-
浏览量:2359次2020-04-30 10:47:42
-
浏览量:1555次2023-03-08 10:48:40
-
浏览量:2297次2018-06-26 20:06:38
-
浏览量:1317次2023-07-04 14:31:19
-
浏览量:2099次2022-09-30 15:13:05
-
浏览量:5186次2020-09-28 10:55:18
-
浏览量:1137次2023-07-27 11:16:16





-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖

yiyi

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
