

tensorRT高级-yolov5模型导出、编译到推理(无封装)

杜老师推出的 tensorRT从零起步高性能部署 课程,之前有看过一遍,但是没有做笔记,很多东西也忘了。这次重新撸一遍,顺便记记笔记。
本次课程学习 tensorRT 高级-yolov5模型导出、编译到推理(无封装)
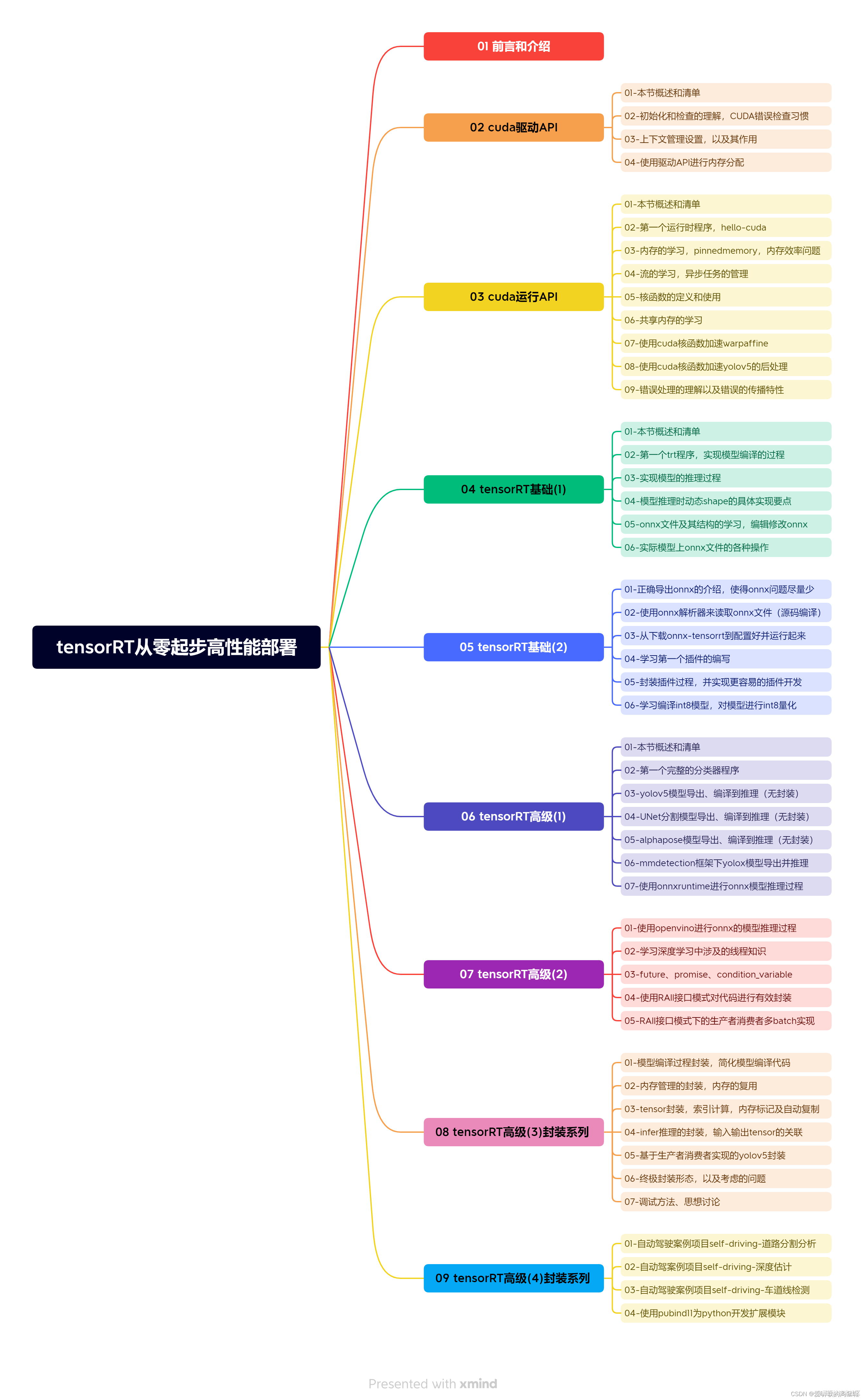
课程大纲可看下面的思维导图
1.YOLOv5导出
我们来来学习 yolov5 onnx 的导出
我们先导出官方的 onnx 以及我们修改过后的 onnx 看看有什么区别
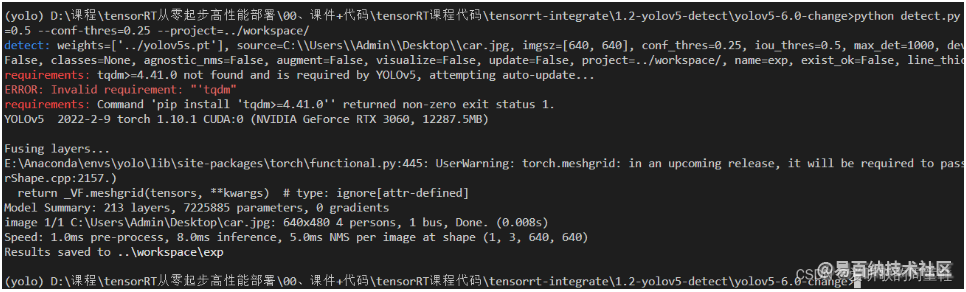
在官方 onnx 导出时,遇到了如下的问题:
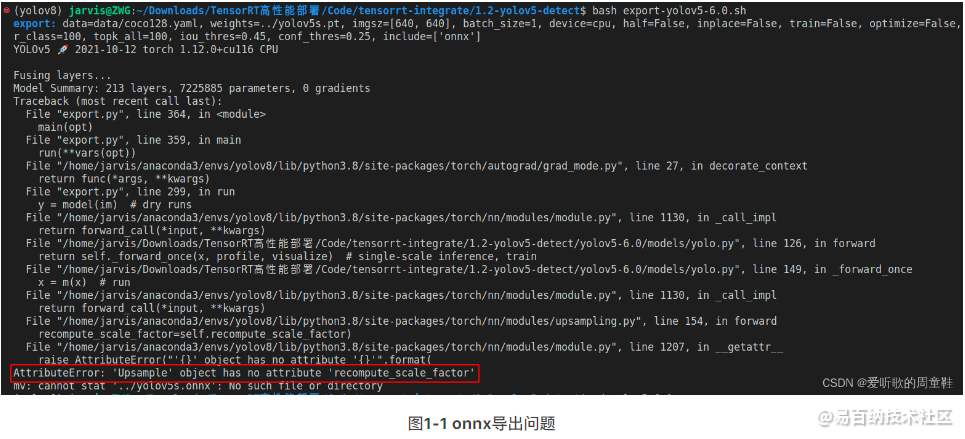
最终发现是 pytorch 版本的原因,yolov5-6.0 有点老了,和现在的高版本的 pytorch 有些不适配也正常
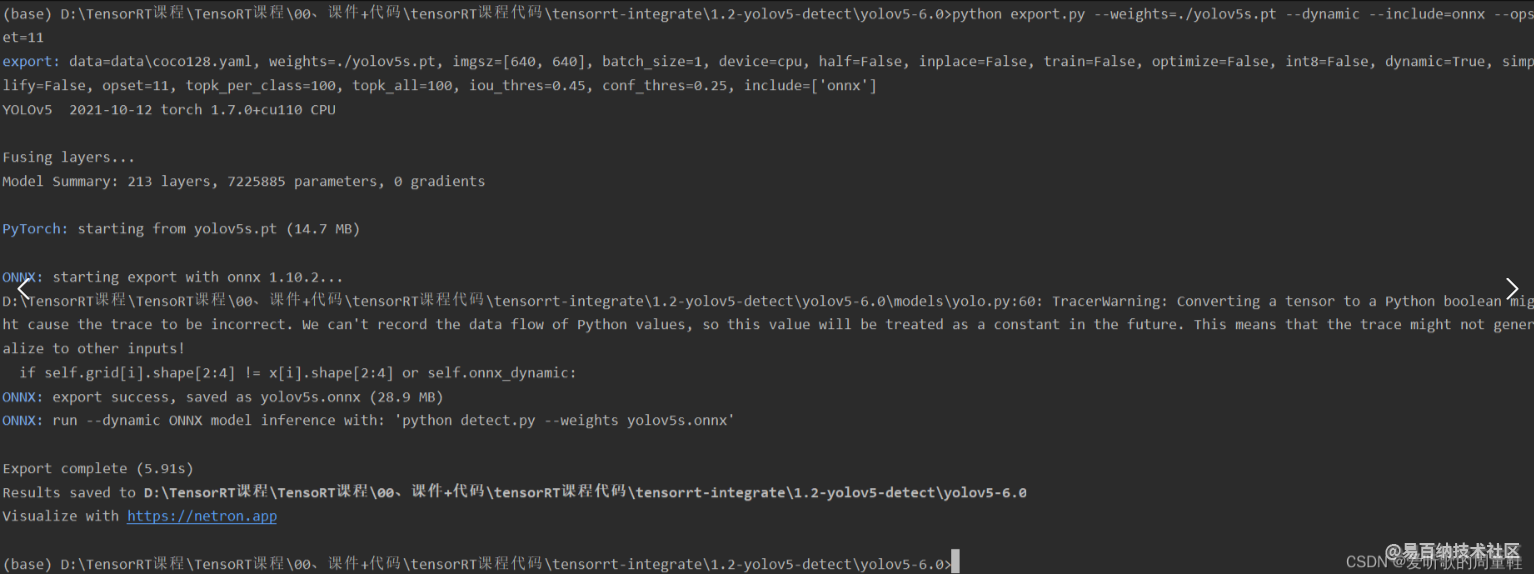
因此博主拿笔记本的低版本 pytorch 导出的,如下所示:
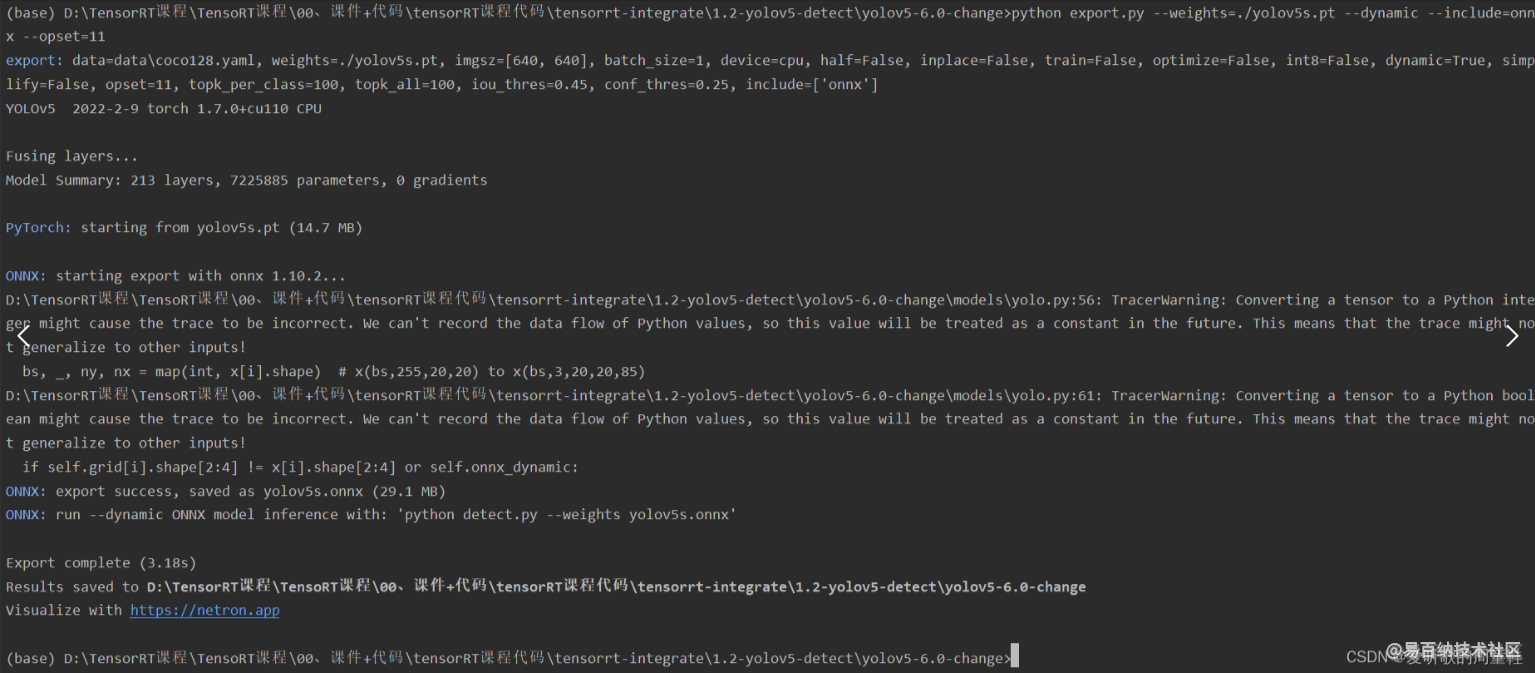
我们再导出经过修改后的 onnx,如下所示:
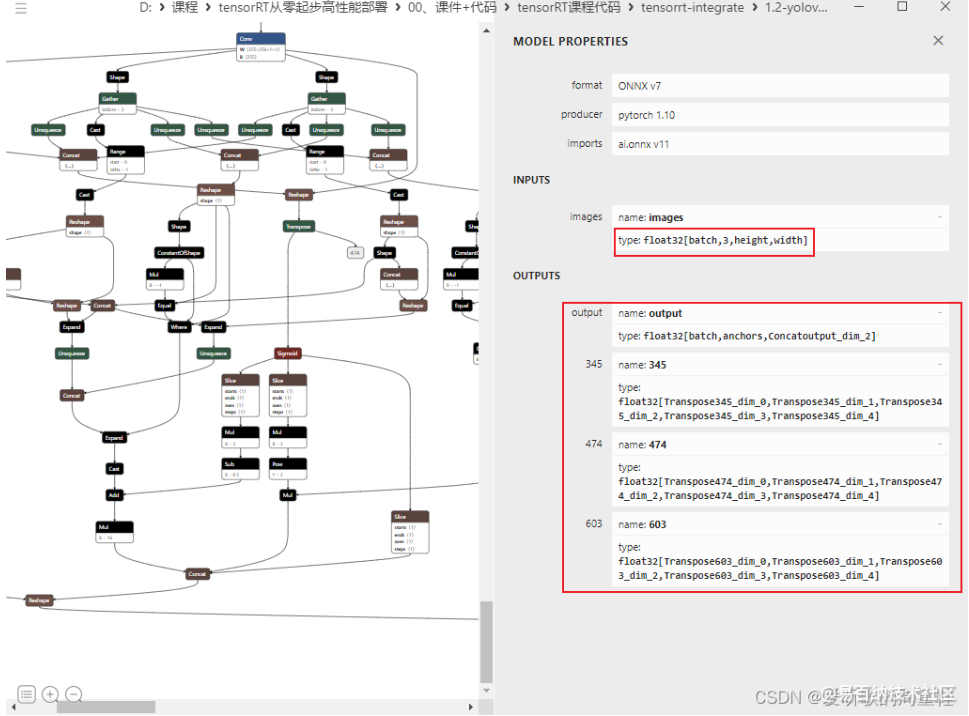
我们利用 Netron 来看下官方的 onnx,首先是输入有 4 个维度,其中的 3 个维度都是动态,它的输出包含 4 项,实际情况下我们只需要 output 这 1 项就行,其次模型结构非常乱
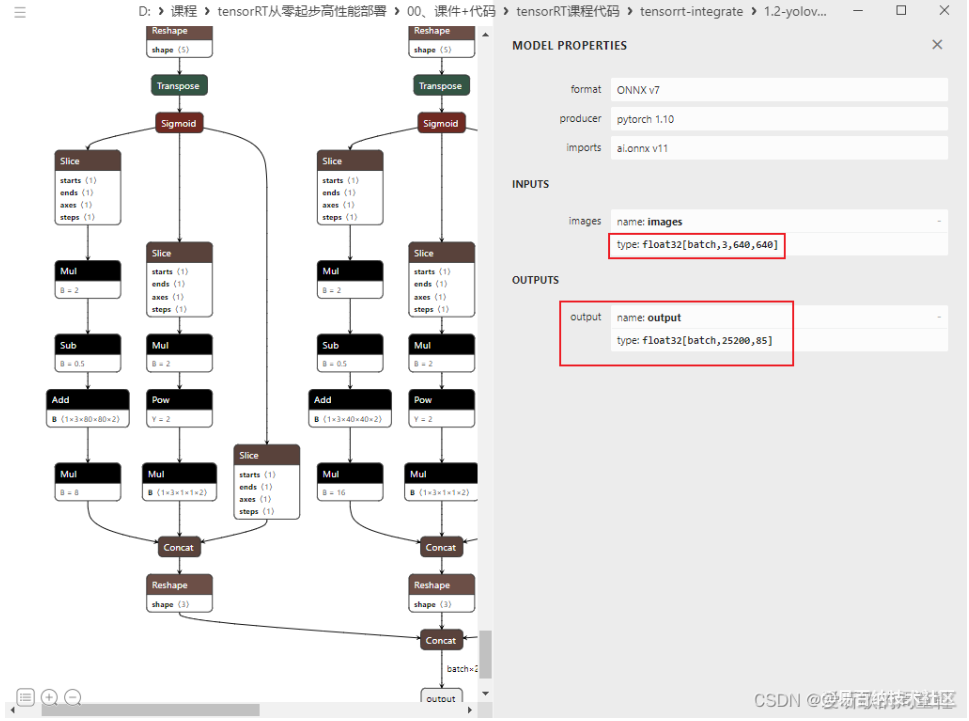
我们再来看下修改后的模型,修改后的模型动态维度只有 batch,没有宽高,输出也只有一个,其次相比于之前更加简洁,更加规范
OK!知道二者区别后,我们看如何修改才能导出我们想要的 onnx 效果,首先是动态,保证 batch 维度动态即可,宽高不要动态。需要修改 yolov5-6.0 第 73 行,onnx 导出的代码,删除宽高的动态,修改后的代码如下:
# ======未修改的代码======
# torch.onnx.export(model, im, f, verbose=False, opset_version=opset,
# training=torch.onnx.TrainingMode.TRAINING if train else torch.onnx.TrainingMode.EVAL,
# do_constant_folding=not train,
# input_names=['images'],
# output_names=['output'],
# dynamic_axes={'images': {0: 'batch', 2: 'height', 3: 'width'}, # shape(1,3,640,640)
# 'output': {0: 'batch', 1: 'anchors'} # shape(1,25200,85)
# } if dynamic else None)
# ======修改后的代码======
torch.onnx.export(model, im, f, verbose=False, opset_version=opset,
training=torch.onnx.TrainingMode.TRAINING if train else torch.onnx.TrainingMode.EVAL,
do_constant_folding=not train,
input_names=['images'],
output_names=['output'],
dynamic_axes={'images': {0: 'batch'}, # shape(1,3,640,640)
'output': {0: 'batch'} # shape(1,25200,85)
} if dynamic else None)
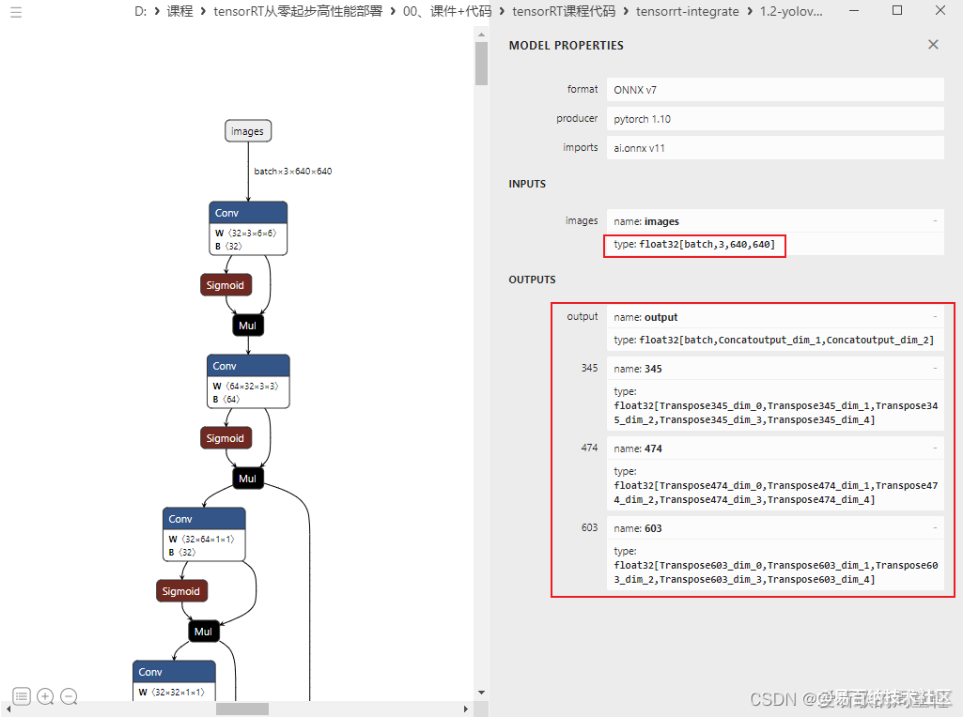
修改后重新导出后可以发现输入 batch 维度动态,宽高不动态,但是似乎 output 还是动态的,这是因为在 output 这个节点之前还有引用 output 的关系在里面,所以造成了它的 shape 是通过计算得到的,而并不是通过确定的值指定得到的,它没有确定的值,所以需要我们接着改。
第二件事情我们来确保输出只有 1 项,把其它 3 项干掉,在 models/yolo.py 第 73 行,Detect 类中的返回值中删除不必要的返回值,修改后的代码如下:
# ======未修改的代码======
# return x if self.training else (torch.cat(z, 1), x)
# ======修改后的代码======
return x if self.training else torch.cat(z, 1)
接着导出,可以看到输出变成 1 个了,如我们所愿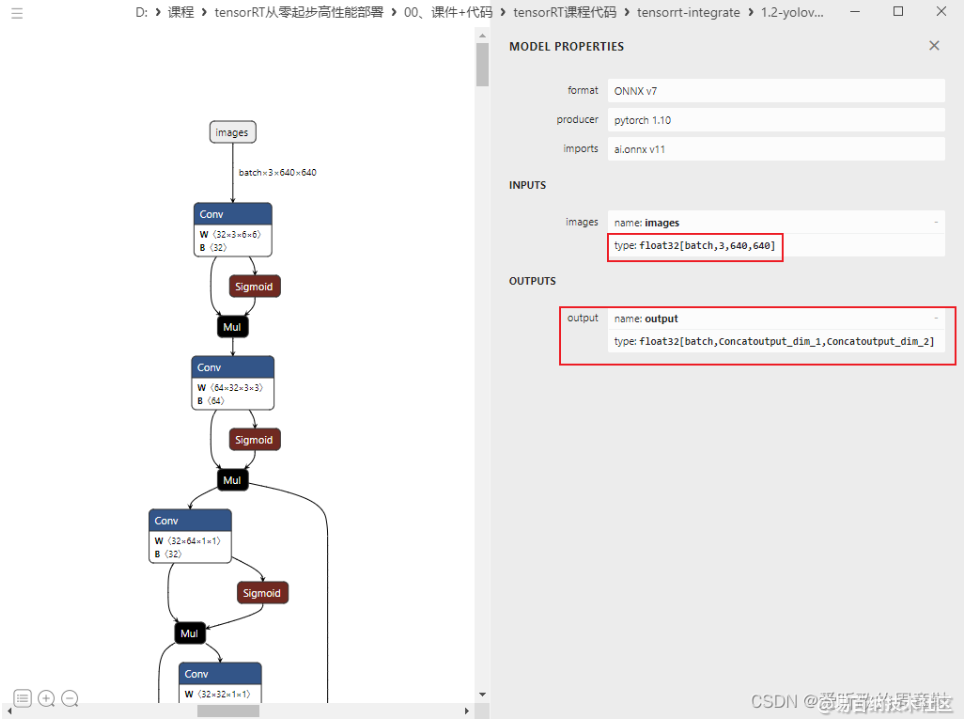
接下来我们删除 Gather Unsqueeze 等不必要的节点,这个主要是由于引用 shape 的返回值所带来的这些节点的增加,在 model/yolo.py 第 56 行,修改代码如下:
# ======未修改的代码======
# bs, _, ny, nx = x[i].shape
# ======修改后的代码======
bs, _, ny, nx = map(int, x[i].shape)
可以看到干净了不少
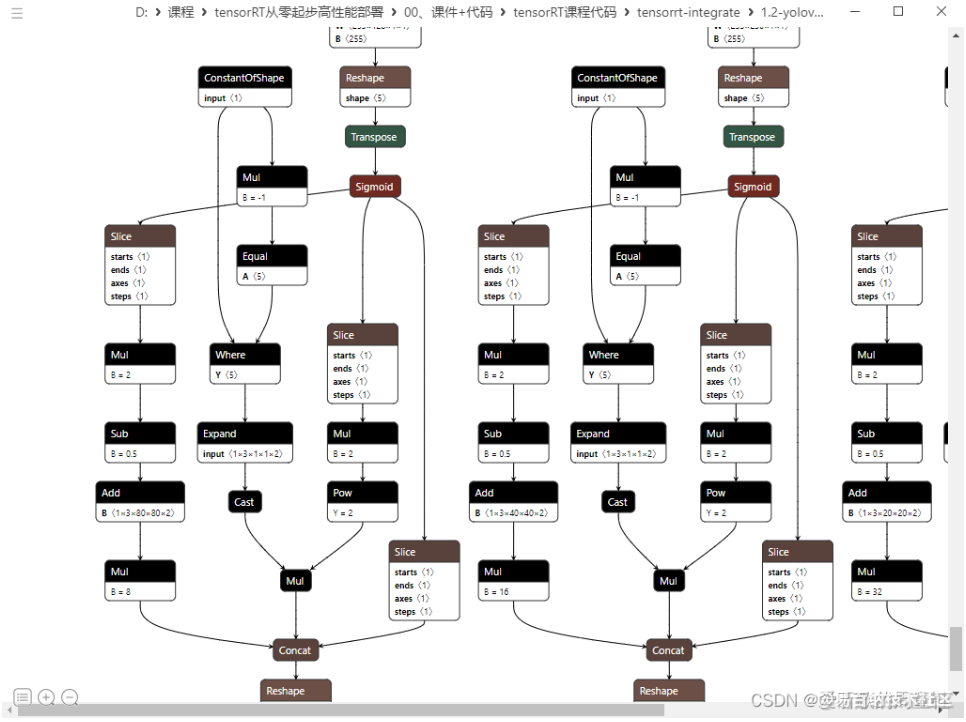
但是还是有点脏的样子,诸如 ConstantOfShape 应该干掉,还有 reshape 节点可以看到 batch 维度不是 -1,当使用动态 batch 的时候会出问题,我们接着往下改
在 model/yolo.py 第 57 行,修改代码如下:
# ======未修改的代码======
# x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
# if not self.training:
# ...
# z.append(y.view(bs, -1, self.no))
# ======修改后的代码======
bs = -1
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
if not self.training:
...
z.append(y.view(-1, self.na * ny * nx, self.no))
再接着导出一下,可以看到此时的 Reshape 的 -1 在 batch 维度上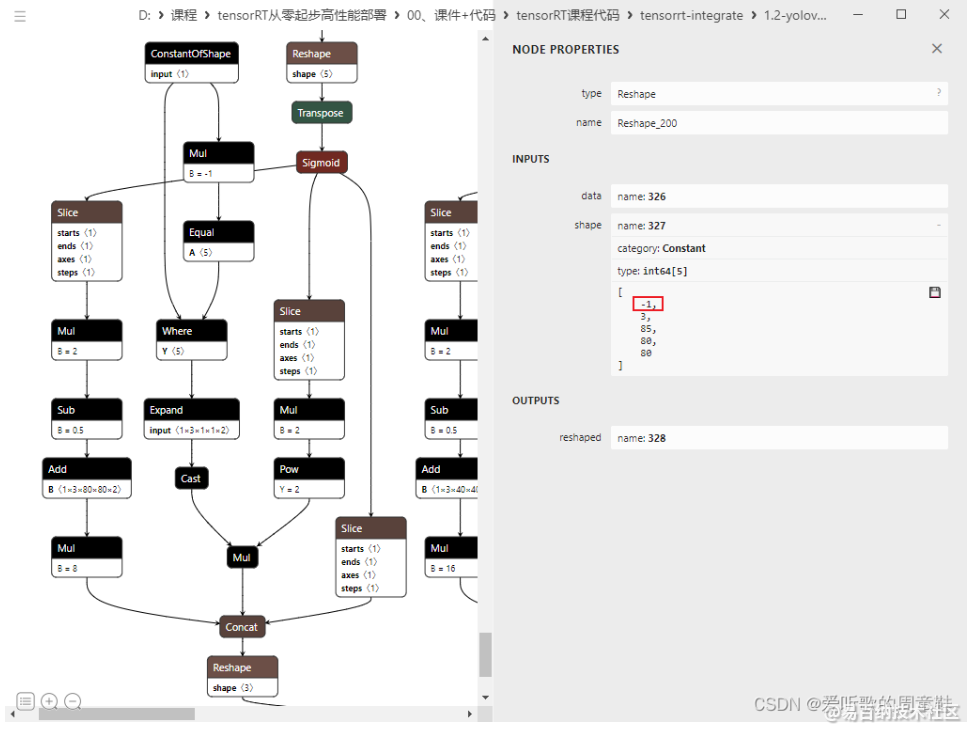
但是还是存在 ConstantOfShape 等节点,这个主要是由于 make_grid 产生的,我们需要让 anchor_grid 断开连接,把它变成一个常量值,直接存储下来,在 model/yolo.py 第 59 行,修改代码如下:
# ======未修改的代码======
# if not self.training: # inference
# if self.grid[i].shape[2:4] != x[i].shape[2:4] or self.onnx_dynamic:
# self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
# y = x[i].sigmoid()
# if self.inplace:
# y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
# y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
# else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
# xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
# wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
# y = torch.cat((xy, wh, y[..., 4:]), -1)
# z.append(y.view(bs, -1, self.no))
# ======修改后的代码======
if not self.training: # inference
if self.grid[i].shape[2:4] != x[i].shape[2:4] or self.onnx_dynamic:
self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
anchor_grid = (self.anchors[i].clone() * self.stride[i]).view(1, -1, 1, 1, 2)
y = x[i].sigmoid()
if self.inplace:
y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * anchor_grid # wh
else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
wh = (y[..., 2:4] * 2) ** 2 * anchor_grid # wh
y = torch.cat((xy, wh, y[..., 4:]), -1)
#z.append(y.view(bs, -1, self.no))
z.append(y.view(bs, self.na * ny * nx, self.no))
接着再导出看下效果,可以看到多余部分的节点被干掉了,直接把它存储到 initializer 里面了,这就是我们最终想要达成的一个效果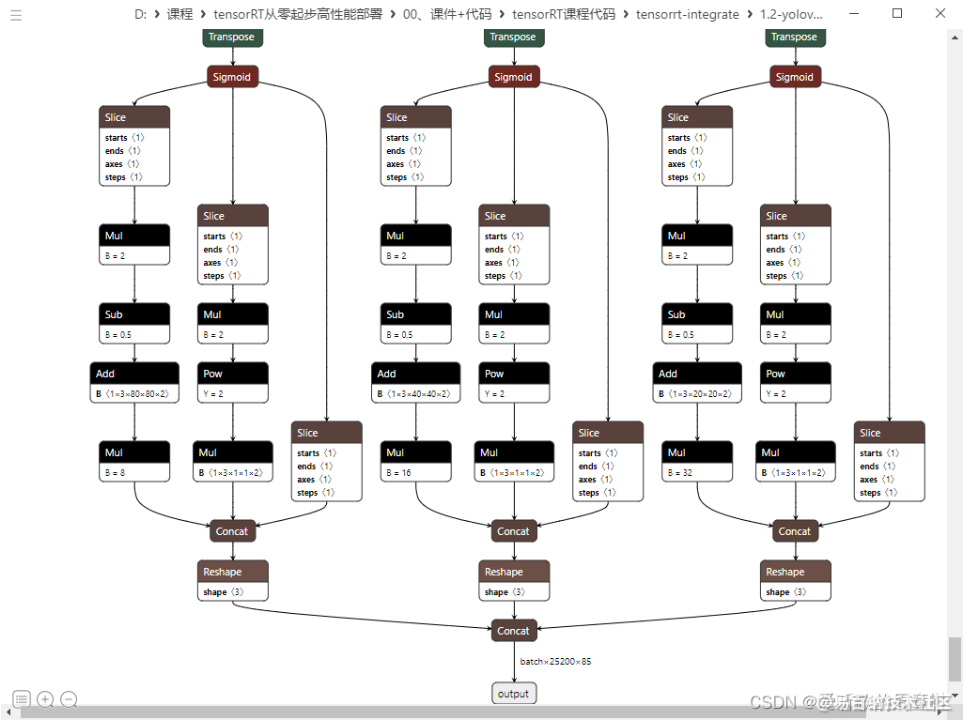
>Note:值的一提的是,在新版 yolov5 中的 onnx 模型导出时其实上述大部分部分问题已经考虑并解决了,但是依旧还是存在某些小问题,具体可参考 Ubuntu20.04部署YOLOv5
##2.YOLOv5推理
>onnx 导出完成后,接下来看看 C++ 推理时的代码
我们先去拿到 pytorch 推理时的结果,如下图所示:
推理过后的图片如下所示: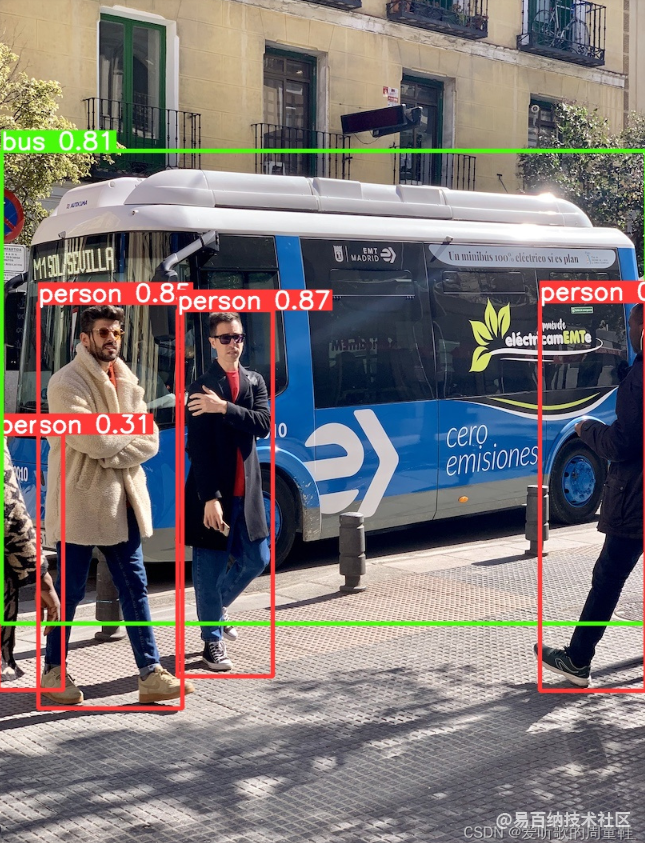
之后我们再到 tensorRT 里面看看推理后的效果
首先看看 main.cpp 中 build_model 部分,可以发现它和我们分类器的案例完全一模一样,先 make run 一下看是否能正常生成 yolov5s.trtmodel 如下所示:
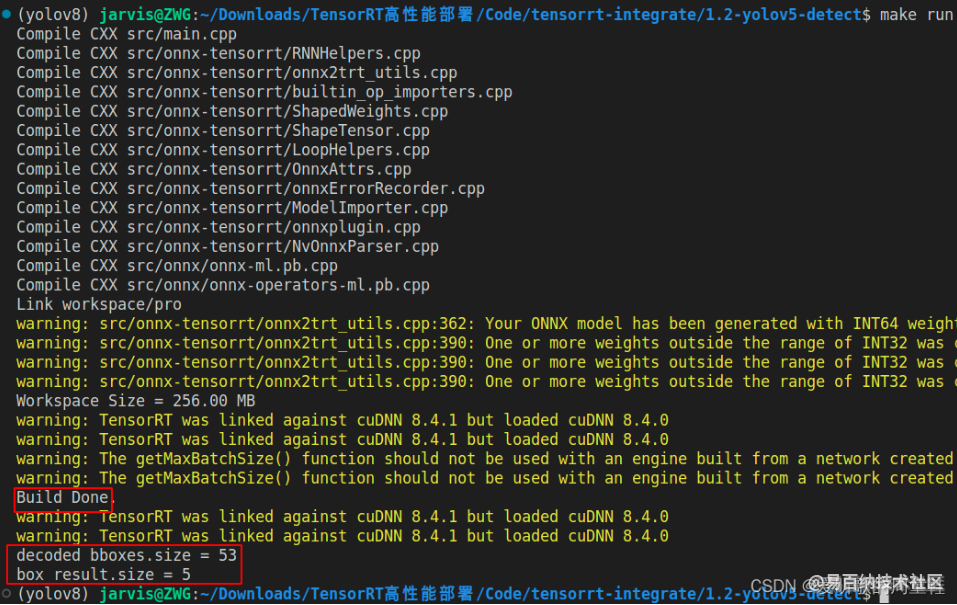
可以看到模型生成和推理成功了,我们来看下 tensorRT 执行的效果: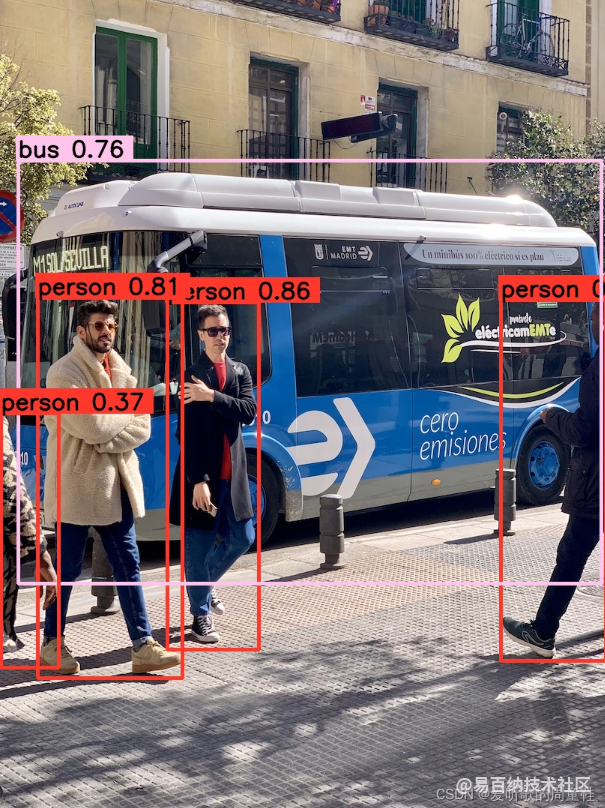
我们再来看下 inference 部分,与分类器相比,无非就是预处理和后处理不一样,其它都差不多,然后就到了 letter box 阶段了,等比缩放居中长边对其并居中,代码如下:
// letter box
auto image = cv::imread("car.jpg");
// 通过双线性插值对图像进行resize
float scale_x = input_width / (float)image.cols;
float scale_y = input_height / (float)image.rows;
float scale = std::min(scale_x, scale_y);
float i2d[6], d2i[6];
// resize图像,源图像和目标图像几何中心的对齐
i2d[0] = scale; i2d[1] = 0; i2d[2] = (-scale * image.cols + input_width + scale - 1) * 0.5;
i2d[3] = 0; i2d[4] = scale; i2d[5] = (-scale * image.rows + input_height + scale - 1) * 0.5;
cv::Mat m2x3_i2d(2, 3, CV_32F, i2d); // image to dst(network), 2x3 matrix
cv::Mat m2x3_d2i(2, 3, CV_32F, d2i); // dst to image, 2x3 matrix
cv::invertAffineTransform(m2x3_i2d, m2x3_d2i); // 计算一个反仿射变换
cv::Mat input_image(input_height, input_width, CV_8UC3);
cv::warpAffine(image, input_image, m2x3_i2d, input_image.size(), cv::INTER_LINEAR, cv::BORDER_CONSTANT, cv::Scalar::all(114)); // 对图像做平移缩放旋转变换,可逆
cv::imwrite("input-image.jpg", input_image);
int image_area = input_image.cols * input_image.rows;
unsigned char* pimage = input_image.data;
float* phost_b = input_data_host + image_area * 0;
float* phost_g = input_data_host + image_area * 1;
float* phost_r = input_data_host + image_area * 2;
for(int i = 0; i < image_area; ++i, pimage += 3){
// 注意这里的顺序rgb调换了
*phost_r++ = pimage[0] / 255.0f;
*phost_g++ = pimage[1] / 255.0f;
*phost_b++ = pimage[2] / 255.0f;
}
上述代码实现了 YOLOv5 中的 letterbox 操作,用于将输入图像按照等比例缩放并填充到指定大小的网络输入。首先,通过双线性插值计算缩放比例,然后构建一个 2x3 的仿射变换矩阵,用于将原图像按照缩放比例进行缩放,并将其填充到指定大小的输入图像中。接着,使用 cv::warpAffine 函数进行缩放和平移变换,得到输入图像 input_image。最后,将图像数据转换为网络输入格式,将像素值归一化到 0~1 之间,并存储到网络输入数据指针 input_data_host 中,以适应网络的输入要求
这个过程其实是可以通过我们之前讲的 warpAffine 来实现的,具体细节可参考 YOLOv5推理详解及预处理高性能实现,这里不再赘述,变换后的图像如下所示:
将输入图像做下预处理塞到 tensorRT 中推理,拿到推理后的结果后还需要进行后处理,具体后处理代码如下所示:
// decode box:从不同尺度下的预测狂还原到原输入图上(包括:预测框,类被概率,置信度)
vector<vector<float>> bboxes;
float confidence_threshold = 0.25;
float nms_threshold = 0.5;
for(int i = 0; i < output_numbox; ++i){
float* ptr = output_data_host + i * output_numprob;
float objness = ptr[4];
if(objness < confidence_threshold)
continue;
float* pclass = ptr + 5;
int label = std::max_element(pclass, pclass + num_classes) - pclass;
float prob = pclass[label];
float confidence = prob * objness;
if(confidence < confidence_threshold)
continue;
// 中心点、宽、高
float cx = ptr[0];
float cy = ptr[1];
float width = ptr[2];
float height = ptr[3];
// 预测框
float left = cx - width * 0.5;
float top = cy - height * 0.5;
float right = cx + width * 0.5;
float bottom = cy + height * 0.5;
// 对应图上的位置
float image_base_left = d2i[0] * left + d2i[2];
float image_base_right = d2i[0] * right + d2i[2];
float image_base_top = d2i[0] * top + d2i[5];
float image_base_bottom = d2i[0] * bottom + d2i[5];
bboxes.push_back({image_base_left, image_base_top, image_base_right, image_base_bottom, (float)label, confidence});
}
printf("decoded bboxes.size = %d\n", bboxes.size());
// nms非极大抑制
std::sort(bboxes.begin(), bboxes.end(), [](vector<float>& a, vector<float>& b){return a[5] > b[5];});
std::vector<bool> remove_flags(bboxes.size());
std::vector<vector<float>> box_result;
box_result.reserve(bboxes.size());
auto iou = [](const vector<float>& a, const vector<float>& b){
float cross_left = std::max(a[0], b[0]);
float cross_top = std::max(a[1], b[1]);
float cross_right = std::min(a[2], b[2]);
float cross_bottom = std::min(a[3], b[3]);
float cross_area = std::max(0.0f, cross_right - cross_left) * std::max(0.0f, cross_bottom - cross_top);
float union_area = std::max(0.0f, a[2] - a[0]) * std::max(0.0f, a[3] - a[1])
+ std::max(0.0f, b[2] - b[0]) * std::max(0.0f, b[3] - b[1]) - cross_area;
if(cross_area == 0 || union_area == 0) return 0.0f;
return cross_area / union_area;
};
for(int i = 0; i < bboxes.size(); ++i){
if(remove_flags[i]) continue;
auto& ibox = bboxes[i];
box_result.emplace_back(ibox);
for(int j = i + 1; j < bboxes.size(); ++j){
if(remove_flags[j]) continue;
auto& jbox = bboxes[j];
if(ibox[4] == jbox[4]){
// class matched
if(iou(ibox, jbox) >= nms_threshold)
remove_flags[j] = true;
}
}
}
printf("box_result.size = %d\n", box_result.size());
上述代码实现了 YOLOv5 目标检测中的后处理步骤,将模型输出的预测框信息进行解码并进行非极大抑制(NMS)处理,得到最终的目标检测结果。
解码预测框:从模型输出的预测中筛选出置信度(confidence)大于阈值(confidence_threshold)的预测框。然后根据预测框的中心点、宽度和高度,计算出预测框在原输入图像上的位置(image_base_left、image_base_right、image_base_top、image_base_bottom),并将结果存储在 bboxes 中。
非极大抑制(NMS):对 bboxes 中的预测框进行按照置信度降序排序。然后使用 IOU 计算两个预测框的重叠程度。如果两个预测框的类别相同且 IOU 大于 NMS 阈值,则认为这两个预测框是重复的,将置信度较低的预测框从结果中移除。最终得到不重复的预测框,存储在 box_result 中。
整个后处理过程实现了从模型输出到最终目标检测结果的转换,包括解码预测框和非极大抑制。这样可以得到准确的目标检测结果,并去除冗余的重复检测框。
关于 decode 解码和 NMS 的具体细节可以参考 YOLOv5推理详解及预处理高性能实现
之前课程提到的 warpAffine 就可以替换为这里的预处理,用 CUDA 核函数进行加速,之前提到的 YoloV5 的核函数后处理也可以替换这里的后处理,从而达到高性能
整个 Yolov5 从模型的修改到导出再到推理拿到结果,没有封装的流程就如上述所示
3.补充知识
对于 yolov5 如何导出模型并利用起来,你需要知道:
- 修改 export_onnx 时的导出参数,使得动态维度指定为 batch,去掉 width 和 height 的指定
- 导出时,对 yolo.py 进行修改,使得后处理能够简化,并将 anchor 合并到 onnx 中
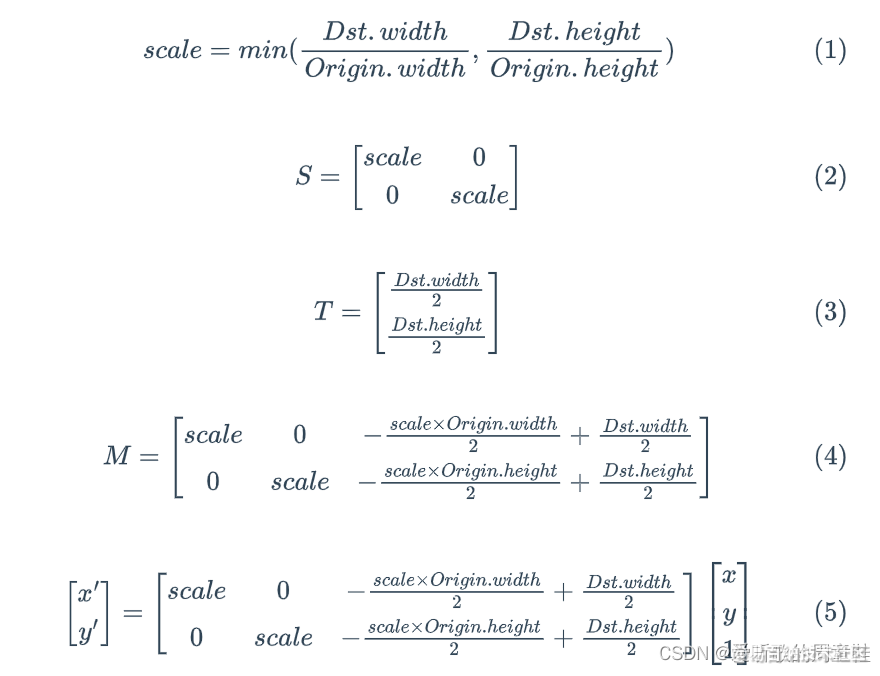
- 预处理部分采用 warpaffine,描述对图像的平移和缩放
关于 yolov5 案例的知识点:(from 杜老师)
- yolov5 的预处理部分,使用了仿射变换,请参照仿射变换原理
- letterbox 采用双线性插值对图像进行 resize,并且使源图像和目标图像几何中心对齐

- 使用仿射变换实现 letterbox 的理由是
便于操作,得到变换矩阵即可
便于逆操作,实现逆矩阵映射即可
便于 cuda 加速,cuda 版本的加速已经在 cuda 系列中提到了 warpaffine 实现
该加速可以允许 warpaffine、normalize、除以255、减均值除以标准差、变换 RB 通道等等在一个核函数中实现,性能最好
2.后处理部分,反算到图像坐标,实际上乘以逆矩阵
- 由于逆矩阵实际上有效自由度是 3,也就是 d2i 中只有 3 个数是不同的,其他都一样。也因此你看到的 d2i[0]、d2i[2]、d2i[5] 在起作用

导出 yolov5-6.0 需要修改以下地方
# line 55 forward function in yolov5/models/yolo.py
# bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
# x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
# modified into:
bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
bs = -1
ny = int(ny)
nx = int(nx)
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
# line 70 in yolov5/models/yolo.py
# z.append(y.view(bs, -1, self.no))
# modified into:
z.append(y.view(bs, self.na * ny * nx, self.no))
############# for yolov5-6.0 #####################
# line 65 in yolov5/models/yolo.py
# if self.grid[i].shape[2:4] != x[i].shape[2:4] or self.onnx_dynamic:
# self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
# modified into:
if self.grid[i].shape[2:4] != x[i].shape[2:4] or self.onnx_dynamic:
self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
# disconnect for pytorch trace
anchor_grid = (self.anchors[i].clone() * self.stride[i]).view(1, -1, 1, 1, 2)
# line 70 in yolov5/models/yolo.py
# y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
# modified into:
y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * anchor_grid # wh
# line 73 in yolov5/models/yolo.py
# wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
# modified into:
wh = (y[..., 2:4] * 2) ** 2 * anchor_grid # wh
############# for yolov5-6.0 #####################
# line 77 in yolov5/models/yolo.py
# return x if self.training else (torch.cat(z, 1), x)
# modified into:
return x if self.training else torch.cat(z, 1)
# line 52 in yolov5/export.py
# torch.onnx.export(dynamic_axes={'images': {0: 'batch', 2: 'height', 3: 'width'}, # shape(1,3,640,640)
# 'output': {0: 'batch', 1: 'anchors'} # shape(1,25200,85) 修改为
# modified into:
torch.onnx.export(dynamic_axes={'images': {0: 'batch'}, # shape(1,3,640,640)
'output': {0: 'batch'} # shape(1,25200,85)
总结
本次课程学习了无封装的 yolov5 模型从导出到编译再到推理的全部过程,学习了如何修改一个 onnx 达到我们想要的结果,同时 yolov5 CPU 版本的预处理和后处理的学习也帮助我们进一步去理解 CUDA 核函数上的实现。
文章来源csdn,如有侵权,请联系删除: https://blog.csdn.net/qq_40672115/article/details/132009159
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:1592次2024-03-05 15:21:43
-
浏览量:3243次2024-01-05 16:46:11
-
浏览量:2413次2023-04-14 10:20:01
-
2024-02-02 14:41:10
-
浏览量:5959次2021-04-06 17:40:39
-
浏览量:4863次2024-03-05 15:05:36
-
浏览量:3151次2024-02-19 15:26:47
-
浏览量:2796次2023-12-29 17:03:02
-
浏览量:4619次2024-02-19 17:07:05
-
浏览量:2627次2023-12-19 16:06:28
-
浏览量:1241次2023-06-03 16:03:04
-
浏览量:3954次2024-01-18 18:05:38
-
浏览量:3734次2024-02-04 17:13:47
-
浏览量:2830次2024-02-23 17:41:04
-
浏览量:5329次2024-02-05 10:41:25
-
浏览量:4316次2024-01-22 17:46:51
-
浏览量:1279次2023-12-20 16:31:10
-
浏览量:5224次2022-10-31 15:07:27
-
浏览量:4445次2022-11-22 10:37:11




-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖

搬砖中~

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
