

SIFT和SURF算法实现目标检测

一、SIFT和SURF算子实现特征点检测
概述
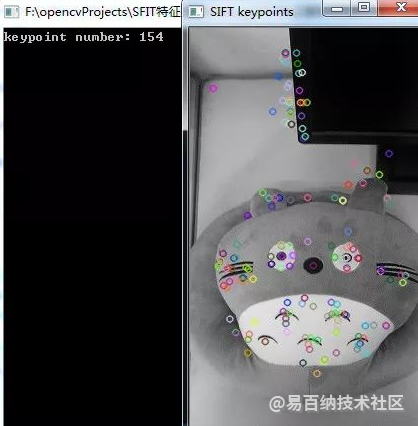
在OpenCV的features2d中实现了SIFT和SURF算法,可以用于图像特征点的自动检测。具体实现是采用SiftFeatureDetector/SurfFeatureDetector类的detect函数检测SIFT/SURF特征的关键点,并保存在vector容器中,最后使用drawKeypoints函数绘制出特征点。
实验所用环境是opencv2.4.9+vs2013+win7
SIFT特征点检测
实验代码如下。这里需要注意SiftFeatureDetector是包含在opencv2/nonfree/features2d.hpp中,所以应该include这个头文件,并且在“项目属性->链接器->输入->附加依赖项”中加入库文件:opencv_nonfree249d.lib。
#include <stdio.h>
#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/nonfree/features2d.hpp" //SurfFeatureDetector实际在该头文件中
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
Mat src = imread("image1.jpg", 0);
if (!src.data)
{
cout << " --(!) Error reading images " << endl;
return -1;
}
//1--初始化SIFT检测算子
int minHessian = 400;
SiftFeatureDetector detector(minHessian);
//2--使用SIFT算子检测特征点
vector<KeyPoint> keypoints;
detector.detect(src, keypoints);
//3--绘制特征点
Mat keypointImg;
drawKeypoints(src, keypoints, keypointImg, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
imshow("SIFT keypoints", keypointImg);
cout << "keypoint number: " << keypoints.size() << endl;
waitKey(0);
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35


SURF特征点检测
同样的,使用SURF特征描述子进行特征点检测的过程类似,只不过换成了SurfFeatureDetector类,实验代码如下:
#include <stdio.h>
#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/nonfree/features2d.hpp" //SurfFeatureDetector实际在该头文件中
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
Mat src = imread("image1.jpg", 0);
if (!src.data)
{
cout << " --(!) Error reading images " << endl;
return -1;
}
//1--初始化SIFT检测算子
int minHessian = 400;
SurfFeatureDetector detector(minHessian);
//2--使用SIFT算子检测特征点
vector<KeyPoint> keypoints;
detector.detect(src, keypoints);
//3--绘制特征点
Mat keypointImg;
drawKeypoints(src, keypoints, keypointImg, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
imshow("SIFT keypoints", keypointImg);
cout << "keypoint number: " << keypoints.size() << endl;
waitKey(0);
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35

从检测结果可以看出,SURF算子检测到的特征点远远多于SIFT算子,至于检测的精确度如何,后面试试利用SIFT和SURF算子进行特征点匹配来区分。
二、SIFT和SURF算子实现特征点提取与匹配
前面SIFT和SURF算子实现特征点检测简单地讲了利用SIFT和SURF算子检测特征点,在检测的基础上可以使用SIFT和SURF算子对特征点进行特征提取并使用匹配函数进行特征点的匹配。具体实现是首先采用SurfFeatureDetector检测特征点,再使用SurfDescriptorExtractor计算特征点的特征向量,最后采用BruteForceMatcher暴力匹配法或者FlannBasedMatcher选择性匹配法(二者的不同)来进行特征点匹配。
实验所用环境是opencv2.4.9+vs2013+win7,需要注意opencv2.4.X版本中SurfFeatureDetector是包含在opencv2/nonfree/features2d.hpp中,BruteForceMatcher是包含在opencv2/legacy/legacy.hpp中,FlannBasedMatcher是包含在opencv2/features2d/features2d.hpp中。
BruteForce匹配法
首先使用BruteForceMatcher暴力匹配法,代码如下:
#include <stdio.h>
#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/nonfree/features2d.hpp" //SurfFeatureDetector实际在该头文件中
#include "opencv2/legacy/legacy.hpp" //BruteForceMatcher实际在该头文件中
//#include "opencv2/features2d/features2d.hpp" //FlannBasedMatcher实际在该头文件中
#include "opencv2/highgui/highgui.hpp"
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
Mat src_1 = imread("image1.jpg", CV_LOAD_IMAGE_GRAYSCALE);
Mat src_2 = imread("image2.jpg", CV_LOAD_IMAGE_GRAYSCALE);
if (!src_1.data || !src_2.data)
{
cout << " --(!) Error reading images " << endl;
return -1;
}
//-- Step 1: 使用SURF算子检测特征点
int minHessian = 400;
SurfFeatureDetector detector(minHessian);
vector<KeyPoint> keypoints_1, keypoints_2;
detector.detect(src_1, keypoints_1);
detector.detect(src_2, keypoints_2);
cout << "img1--number of keypoints: " << keypoints_1.size() << endl;
cout << "img2--number of keypoints: " << keypoints_2.size() << endl;
//-- Step 2: 使用SURF算子提取特征(计算特征向量)
SurfDescriptorExtractor extractor;
Mat descriptors_1, descriptors_2;
extractor.compute(src_1, keypoints_1, descriptors_1);
extractor.compute(src_2, keypoints_2, descriptors_2);
//-- Step 3: 使用BruteForce法进行暴力匹配
BruteForceMatcher< L2<float> > matcher;
vector< DMatch > matches;
matcher.match(descriptors_1, descriptors_2, matches);
cout << "number of matches: " << matches.size() << endl;
//-- 显示匹配结果
Mat matchImg;
drawMatches(src_1, keypoints_1, src_2, keypoints_2, matches, matchImg);
imshow("matching result", matchImg);
waitKey(0);
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
实验结果: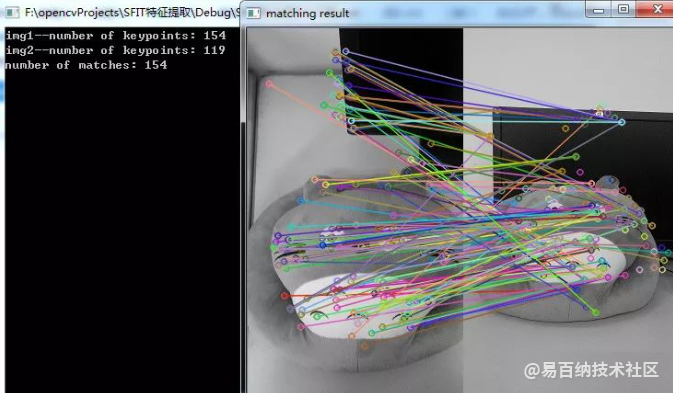
FLANN匹配法
使用暴力匹配的结果不怎么好,下面使用FlannBasedMatcher进行特征匹配,只保留好的特征匹配点,代码如下:
#include <stdio.h>
#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/nonfree/features2d.hpp" //SurfFeatureDetector实际在该头文件中
//#include "opencv2/legacy/legacy.hpp" //BruteForceMatcher实际在该头文件中
#include "opencv2/features2d/features2d.hpp" //FlannBasedMatcher实际在该头文件中
#include "opencv2/highgui/highgui.hpp"
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
Mat src_1 = imread("image1.jpg", CV_LOAD_IMAGE_GRAYSCALE);
Mat src_2 = imread("image2.jpg", CV_LOAD_IMAGE_GRAYSCALE);
if (!src_1.data || !src_2.data)
{
cout << " --(!) Error reading images " << endl;
return -1;
}
//-- Step 1: 使用SURF算子检测特征点
int minHessian = 400;
SurfFeatureDetector detector(minHessian);
vector<KeyPoint> keypoints_1, keypoints_2;
detector.detect(src_1, keypoints_1);
detector.detect(src_2, keypoints_2);
cout << "img1--number of keypoints: " << keypoints_1.size() << endl;
cout << "img2--number of keypoints: " << keypoints_2.size() << endl;
//-- Step 2: 使用SURF算子提取特征(计算特征向量)
SurfDescriptorExtractor extractor;
Mat descriptors_1, descriptors_2;
extractor.compute(src_1, keypoints_1, descriptors_1);
extractor.compute(src_2, keypoints_2, descriptors_2);
//-- Step 3: 使用FLANN法进行匹配
FlannBasedMatcher matcher;
vector< DMatch > allMatches;
matcher.match(descriptors_1, descriptors_2, allMatches);
cout << "number of matches before filtering: " << allMatches.size() << endl;
//-- 计算关键点间的最大最小距离
double maxDist = 0;
double minDist = 100;
for (int i = 0; i < descriptors_1.rows; i++)
{
double dist = allMatches[i].distance;
if (dist < minDist)
minDist = dist;
if (dist > maxDist)
maxDist = dist;
}
printf(" max dist : %f \n", maxDist);
printf(" min dist : %f \n", minDist);
//-- 过滤匹配点,保留好的匹配点(这里采用的标准:distance<2*minDist)
vector< DMatch > goodMatches;
for (int i = 0; i < descriptors_1.rows; i++)
{
if (allMatches[i].distance < 2 * minDist)
goodMatches.push_back(allMatches[i]);
}
cout << "number of matches after filtering: " << goodMatches.size() << endl;
//-- 显示匹配结果
Mat matchImg;
drawMatches(src_1, keypoints_1, src_2, keypoints_2,
goodMatches, matchImg, Scalar::all(-1), Scalar::all(-1),
vector<char>(),
DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS //不显示未匹配的点
);
imshow("matching result", matchImg);
//-- 输出匹配点的对应关系
for (int i = 0; i < goodMatches.size(); i++)
printf(" good match %d: keypoints_1 [%d] -- keypoints_2 [%d]\n", i,
goodMatches[i].queryIdx, goodMatches[i].trainIdx);
waitKey(0);
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
实验结果: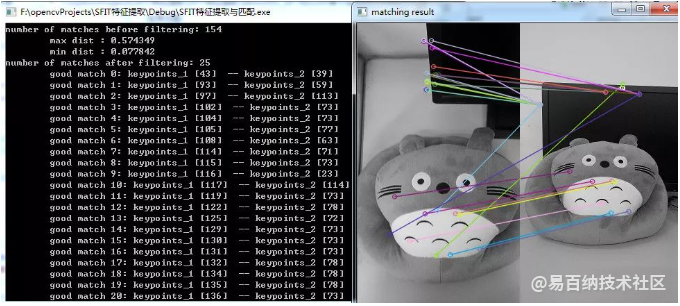
从第二个实验结果可以看出,经过过滤之后特征点数目从154减少到25,匹配的准确度有所上升。当然也可以使用SIFT算子进行上述两种匹配实验,只需要将SurfFeatureDetector换成SiftFeatureDetector,将SurfDescriptorExtractor换成SiftDescriptorExtractor即可。
区别
二者的区别在于BFMatcher总是尝试所有可能的匹配,从而使得它总能够找到最 佳匹配,这也是Brute Force(暴力法)的原始含义。而FlannBasedMatcher中FLANN的含义是Fast Library forApproximate Nearest Neighbors,从字面意思可知它是一种近似法,算法更快但是找到的是最近邻近似匹配,所以当我们需要找到一个相对好的匹配但是不需要最 佳匹配的时候往往使用FlannBasedMatcher。当然也可以通过调整FlannBasedMatcher的参数来提高匹配的精度或者提高算法速度,但是相应地算法速度或者算法精度会受到影响。
此外,使用特征提取过程得到的特征描述符(descriptor)数据类型有的是float类型的,比如说SurfDescriptorExtractor,SiftDescriptorExtractor,有的是uchar类型的,比如说有ORB,BriefDescriptorExtractor。对应float类型的匹配方式有:FlannBasedMatcher,BruteForce
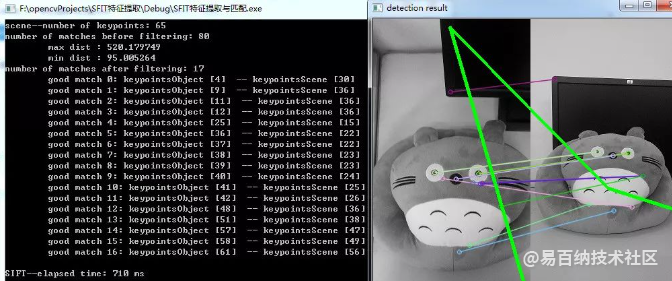
三、SIFT和SURF算法实现目标检测
概述
之前SIFT和SURF算子实现特征点检测和SURF算子实现特征点提取与匹配简单地讲了利用SIFT和SURF算子检测特征点,并且对特征点进行特征提取得到特征描述符(descriptors),在此基础上还可以进一步利用透视变换和空间映射找出已知物体(目标检测)。这里具体的实现是首先采用SURF/SIFT特征点检测与特征提取,然后采用FLANN匹配法保留好的匹配点,再利用findHomography找出相应的透视变换,最后采用perspectiveTransform函数映射点群,在场景中获取目标的位置。
实验所用环境是opencv2.4.9+vs2013+win7,需要注意opencv2.4.X版本中SurfFeatureDetector/SiftFeatureDetector是包含在opencv2/nonfree/features2d.hpp中,FlannBasedMatcher是包含在opencv2/features2d/features2d.hpp中。
SURF算子
首先使用SURF算子进行目标检测,代码如下:
/**
* @概述: 采用SURF算子在场景中进行已知目标检测
* @类和函数: SurfFeatureDetector + SurfDescriptorExtractor + FlannBasedMatcher + findHomography + perspectiveTransform
* @实现步骤:
* Step 1: 在图像中使用SURF算法SurfFeatureDetector检测关键点
* Step 2: 对检测到的每一个关键点使用SurfDescriptorExtractor计算其特征向量(也称描述子)
* Step 3: 使用FlannBasedMatcher通过特征向量对关键点进行匹配,使用阈值剔除不好的匹配
* Step 4: 利用findHomography基于匹配的关键点找出相应的透视变换
* Step 5: 利用perspectiveTransform函数映射点群,在场景中获取目标的位置
*/
#include <ctime>
#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/nonfree/features2d.hpp" //SurfFeatureDetector实际在该头文件中
#include "opencv2/features2d/features2d.hpp" //FlannBasedMatcher实际在该头文件中
#include "opencv2/calib3d/calib3d.hpp" //findHomography所需头文件
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
Mat imgObject = imread("image1.jpg", CV_LOAD_IMAGE_GRAYSCALE);
Mat imgScene = imread("image2.jpg", CV_LOAD_IMAGE_GRAYSCALE);
if (!imgObject.data || !imgScene.data)
{
cout << " --(!) Error reading images " << endl;
return -1;
}
double begin = clock();
///-- Step 1: 使用SURF算子检测特征点
int minHessian = 400;
SurfFeatureDetector detector(minHessian);
vector<KeyPoint> keypointsObject, keypointsScene;
detector.detect(imgObject, keypointsObject);
detector.detect(imgScene, keypointsScene);
cout << "object--number of keypoints: " << keypointsObject.size() << endl;
cout << "scene--number of keypoints: " << keypointsScene.size() << endl;
///-- Step 2: 使用SURF算子提取特征(计算特征向量)
SurfDescriptorExtractor extractor;
Mat descriptorsObject, descriptorsScene;
extractor.compute(imgObject, keypointsObject, descriptorsObject);
extractor.compute(imgScene, keypointsScene, descriptorsScene);
///-- Step 3: 使用FLANN法进行匹配
FlannBasedMatcher matcher;
vector< DMatch > allMatches;
matcher.match(descriptorsObject, descriptorsScene, allMatches);
cout << "number of matches before filtering: " << allMatches.size() << endl;
//-- 计算关键点间的最大最小距离
double maxDist = 0;
double minDist = 100;
for (int i = 0; i < descriptorsObject.rows; i++)
{
double dist = allMatches[i].distance;
if (dist < minDist)
minDist = dist;
if (dist > maxDist)
maxDist = dist;
}
printf(" max dist : %f \n", maxDist);
printf(" min dist : %f \n", minDist);
//-- 过滤匹配点,保留好的匹配点(这里采用的标准:distance<3*minDist)
vector< DMatch > goodMatches;
for (int i = 0; i < descriptorsObject.rows; i++)
{
if (allMatches[i].distance < 2 * minDist)
goodMatches.push_back(allMatches[i]);
}
cout << "number of matches after filtering: " << goodMatches.size() << endl;
//-- 显示匹配结果
Mat resultImg;
drawMatches(imgObject, keypointsObject, imgScene, keypointsScene,
goodMatches, resultImg, Scalar::all(-1), Scalar::all(-1), vector<char>(),
DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS //不显示未匹配的点
);
//-- 输出匹配点的对应关系
for (int i = 0; i < goodMatches.size(); i++)
printf(" good match %d: keypointsObject [%d] -- keypointsScene [%d]\n", i,
goodMatches[i].queryIdx, goodMatches[i].trainIdx);
///-- Step 4: 使用findHomography找出相应的透视变换
vector<Point2f> object;
vector<Point2f> scene;
for (size_t i = 0; i < goodMatches.size(); i++)
{
//-- 从好的匹配中获取关键点: 匹配关系是关键点间具有的一 一对应关系,可以从匹配关系获得关键点的索引
//-- e.g. 这里的goodMatches[i].queryIdx和goodMatches[i].trainIdx是匹配中一对关键点的索引
object.push_back(keypointsObject[goodMatches[i].queryIdx].pt);
scene.push_back(keypointsScene[goodMatches[i].trainIdx].pt);
}
Mat H = findHomography(object, scene, CV_RANSAC);
///-- Step 5: 使用perspectiveTransform映射点群,在场景中获取目标位置
std::vector<Point2f> objCorners(4);
objCorners[0] = cvPoint(0, 0);
objCorners[1] = cvPoint(imgObject.cols, 0);
objCorners[2] = cvPoint(imgObject.cols, imgObject.rows);
objCorners[3] = cvPoint(0, imgObject.rows);
std::vector<Point2f> sceneCorners(4);
perspectiveTransform(objCorners, sceneCorners, H);
//-- 在被检测到的目标四个角之间划线
line(resultImg, sceneCorners[0] + Point2f(imgObject.cols, 0), sceneCorners[1] + Point2f(imgObject.cols, 0), Scalar(0, 255, 0), 4);
line(resultImg, sceneCorners[1] + Point2f(imgObject.cols, 0), sceneCorners[2] + Point2f(imgObject.cols, 0), Scalar(0, 255, 0), 4);
line(resultImg, sceneCorners[2] + Point2f(imgObject.cols, 0), sceneCorners[3] + Point2f(imgObject.cols, 0), Scalar(0, 255, 0), 4);
line(resultImg, sceneCorners[3] + Point2f(imgObject.cols, 0), sceneCorners[0] + Point2f(imgObject.cols, 0), Scalar(0, 255, 0), 4);
//-- 显示检测结果
imshow("detection result", resultImg);
double end = clock();
cout << "\nSURF--elapsed time: " << (end - begin) / CLOCKS_PER_SEC * 1000 << " ms\n";
waitKey(0);
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125

SIFT算子
作为对比,再使用SIFT算子进行目标检测,只需要将SurfFeatureDetector换成SiftFeatureDetector,将SurfDescriptorExtractor换成SiftDescriptorExtractor即可。代码如下:
/**
* @概述: 采用SIFT算子在场景中进行已知目标检测
* @类和函数: SiftFeatureDetector + SiftDescriptorExtractor + FlannBasedMatcher + findHomography + perspectiveTransform
* @实现步骤:
* Step 1: 在图像中使用SIFT算法SiftFeatureDetector检测关键点
* Step 2: 对检测到的每一个关键点使用SiftDescriptorExtractor计算其特征向量(也称描述子)
* Step 3: 使用FlannBasedMatcher通过特征向量对关键点进行匹配,使用阈值剔除不好的匹配
* Step 4: 利用findHomography基于匹配的关键点找出相应的透视变换
* Step 5: 利用perspectiveTransform函数映射点群,在场景中获取目标的位置
*/
#include <ctime>
#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/nonfree/features2d.hpp" //SiftFeatureDetector实际在该头文件中
#include "opencv2/features2d/features2d.hpp" //FlannBasedMatcher实际在该头文件中
#include "opencv2/calib3d/calib3d.hpp" //findHomography所需头文件
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
Mat imgObject = imread("image1.jpg", CV_LOAD_IMAGE_GRAYSCALE);
Mat imgScene = imread("image2.jpg", CV_LOAD_IMAGE_GRAYSCALE);
if (!imgObject.data || !imgScene.data)
{
cout << " --(!) Error reading images " << endl;
return -1;
}
double begin = clock();
///-- Step 1: 使用SIFT算子检测特征点
//int minHessian = 400;
SiftFeatureDetector detector;//( minHessian );
vector<KeyPoint> keypointsObject, keypointsScene;
detector.detect(imgObject, keypointsObject);
detector.detect(imgScene, keypointsScene);
cout << "object--number of keypoints: " << keypointsObject.size() << endl;
cout << "scene--number of keypoints: " << keypointsScene.size() << endl;
///-- Step 2: 使用SIFT算子提取特征(计算特征向量)
SiftDescriptorExtractor extractor;
Mat descriptorsObject, descriptorsScene;
extractor.compute(imgObject, keypointsObject, descriptorsObject);
extractor.compute(imgScene, keypointsScene, descriptorsScene);
///-- Step 3: 使用FLANN法进行匹配
FlannBasedMatcher matcher;
vector< DMatch > allMatches;
matcher.match(descriptorsObject, descriptorsScene, allMatches);
cout << "number of matches before filtering: " << allMatches.size() << endl;
//-- 计算关键点间的最大最小距离
double maxDist = 0;
double minDist = 100;
for (int i = 0; i < descriptorsObject.rows; i++)
{
double dist = allMatches[i].distance;
if (dist < minDist)
minDist = dist;
if (dist > maxDist)
maxDist = dist;
}
printf(" max dist : %f \n", maxDist);
printf(" min dist : %f \n", minDist);
//-- 过滤匹配点,保留好的匹配点(这里采用的标准:distance<3*minDist)
vector< DMatch > goodMatches;
for (int i = 0; i < descriptorsObject.rows; i++)
{
if (allMatches[i].distance < 2 * minDist)
goodMatches.push_back(allMatches[i]);
}
cout << "number of matches after filtering: " << goodMatches.size() << endl;
//-- 显示匹配结果
Mat resultImg;
drawMatches(imgObject, keypointsObject, imgScene, keypointsScene,
goodMatches, resultImg, Scalar::all(-1), Scalar::all(-1), vector<char>(),
DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS //不显示未匹配的点
);
//-- 输出匹配点的对应关系
for (int i = 0; i < goodMatches.size(); i++)
printf(" good match %d: keypointsObject [%d] -- keypointsScene [%d]\n", i,
goodMatches[i].queryIdx, goodMatches[i].trainIdx);
///-- Step 4: 使用findHomography找出相应的透视变换
vector<Point2f> object;
vector<Point2f> scene;
for (size_t i = 0; i < goodMatches.size(); i++)
{
//-- 从好的匹配中获取关键点: 匹配关系是关键点间具有的一 一对应关系,可以从匹配关系获得关键点的索引
//-- e.g. 这里的goodMatches[i].queryIdx和goodMatches[i].trainIdx是匹配中一对关键点的索引
object.push_back(keypointsObject[goodMatches[i].queryIdx].pt);
scene.push_back(keypointsScene[goodMatches[i].trainIdx].pt);
}
Mat H = findHomography(object, scene, CV_RANSAC);
///-- Step 5: 使用perspectiveTransform映射点群,在场景中获取目标位置
std::vector<Point2f> objCorners(4);
objCorners[0] = cvPoint(0, 0);
objCorners[1] = cvPoint(imgObject.cols, 0);
objCorners[2] = cvPoint(imgObject.cols, imgObject.rows);
objCorners[3] = cvPoint(0, imgObject.rows);
std::vector<Point2f> sceneCorners(4);
perspectiveTransform(objCorners, sceneCorners, H);
//-- 在被检测到的目标四个角之间划线
line(resultImg, sceneCorners[0] + Point2f(imgObject.cols, 0), sceneCorners[1] + Point2f(imgObject.cols, 0), Scalar(0, 255, 0), 4);
line(resultImg, sceneCorners[1] + Point2f(imgObject.cols, 0), sceneCorners[2] + Point2f(imgObject.cols, 0), Scalar(0, 255, 0), 4);
line(resultImg, sceneCorners[2] + Point2f(imgObject.cols, 0), sceneCorners[3] + Point2f(imgObject.cols, 0), Scalar(0, 255, 0), 4);
line(resultImg, sceneCorners[3] + Point2f(imgObject.cols, 0), sceneCorners[0] + Point2f(imgObject.cols, 0), Scalar(0, 255, 0), 4);
//-- 显示检测结果
imshow("detection result", resultImg);
double end = clock();
cout << "\nSIFT--elapsed time: " << (end - begin) / CLOCKS_PER_SEC * 1000 << " ms\n";
waitKey(0);
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
2024-02-02 14:41:10
-
浏览量:1266次2024-03-14 18:20:47
-
浏览量:5129次2024-02-02 17:13:35
-
浏览量:2427次2023-12-16 11:15:45
-
浏览量:5664次2021-08-09 16:11:19
-
浏览量:1909次2018-07-26 10:16:39
-
浏览量:1344次2023-12-20 16:40:32
-
浏览量:740次2023-04-11 10:29:43
-
浏览量:777次2023-12-18 18:07:01
-
浏览量:1458次2024-03-04 14:48:01
-
浏览量:1405次2023-09-08 15:20:45
-
浏览量:1444次2023-12-19 16:51:40
-
浏览量:2770次2024-02-02 18:15:06
-
浏览量:844次2023-12-15 14:10:52
-
浏览量:1169次2023-09-19 17:11:18
-
浏览量:2573次2020-12-27 08:54:47
-
浏览量:979次2023-06-03 16:08:12
-
浏览量:733次2023-12-19 11:06:03
-
浏览量:8722次2020-12-16 13:01:00




-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
不会编程的老王

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
