

辅助人们行走的可穿戴机器人

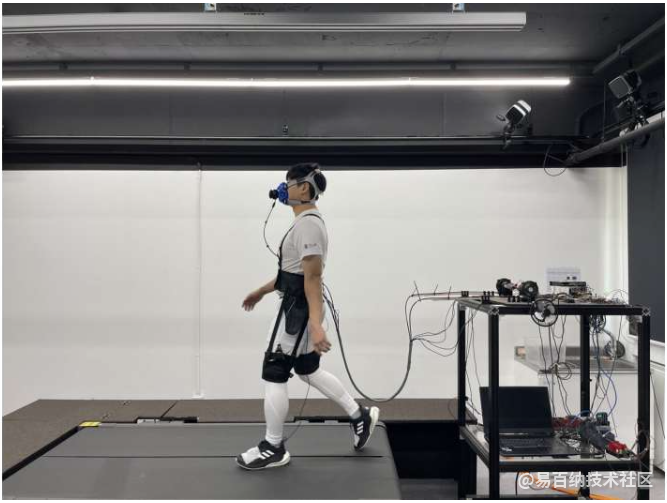
由中央大学辅助与康复机器人实验室设计的创新型髋关节外展辅助可穿戴机器人
近年来,机器人专家引入了越来越先进的系统,这可能为手术、康复和医疗保健援助开辟令人兴奋的新可能性。这些机器人系统已经帮助改善了许多残疾人以及遭受身体创伤或接受医疗程序的患者的生活质量。
韩国中央大学的研究人员最近推出了一种新的可穿戴机器人,旨在专门帮助因衰老、肌肉无力、手术或特定医疗条件而行走困难的人类。该机器人在发表在《科学机器人》杂志上的一篇论文中提出,被发现可以改善平衡,同时还可以减少行走时消耗的能量(即所谓的代谢成本)。
开展这项研究的研究人员之一Giuk Lee说:“我们最近的论文主要受到了这样一个认识的启发,即大多数用于步态辅助的可穿戴机器人都只关注矢状面上的运动。然而,步行本质上是一种三维活动,其他平面的运动也同样至关重要。”
与过去提出的其他髋关节外展辅助机器人系统不同,Lee和他的同事创建的机器人专注于额叶平面。这是人体的前部,已知在行走时支持运动和侧向稳定性。
该论文的合著者Myunghee Kim说:“传统上,对步行运动的研究将向前运动和横向平衡视为单独的功能。直到最近,前后方向的辅助作用才因其对横向稳定性的贡献而得到认可。然而,横向辅助对前后行走效率的影响仍然没有得到充分的探索。”
研究人员研究背后的关键假设是,使用模拟自然髋关节外展时刻的可穿戴机器人可以降低步行的代谢成本。这是腿离开身体中线的运动,它支持步行和人类每天进行的许多其他动作。

“我们开发的用于髋关节外展辅助的可穿戴机器人的工作原理是通过支持身体的横向运动来提高步行效率,”Lee说。“当我们向前走时,我们身体的重心自然地左右移动以保持平衡——这个过程被称为恢复。在这个恢复阶段,髋关节外展肌被激活。我们的设备可以帮助这些肌肉,使佩戴者更容易以更少的努力恢复他们的重心。
Lee和他的同事在模拟和真实世界实验中评估了他们的机器人的性能。这些测试的结果非常有希望,表明与正常的无辅助步行相比,机器人将步行的新陈代谢成本降低了11.6%,同时还改善了平衡和稳定性。
“我们的研究表明,提高步态效率并不需要可穿戴机器人只关注矢状面,”Lee说。“由于步行是一种三维运动,因此必须考虑跨不同平面的运动。
从本质上讲,Lee和他的同事开发的髋关节外展辅助机器人会影响已知支持行走的臀部和腿部的运动。其独特的设计使其能够有效地“取代”人类在行走时通常付出的部分努力。
“我们的研究表明,通过促进身体的质心从一只脚更有效地转移到另一只脚,横向辅助在提高步行效率方面发挥着重要作用,”Kim补充道。“对于肌肉力量下降的人来说,这一见解尤其令人鼓舞,为支持机制提供了新的方向。展望未来,重要的是要探索横向援助如何帮助行动不便的人,从而可能改变康复和支持策略。
未来,该团队开发的机器人系统可以进一步改进并最终商业化,支持康复和日常使用。该机器人可能对老年人、接受腿部或髋关节手术的患者以及其他行走困难的人有用。
“对于未来的研究,我们计划更深入地研究髋关节外展如何影响步行平衡,”Lee补充道。“我们观察到,髋关节外展不仅可以提高步态效率,还可能影响平衡。我们的目标是探索可穿戴机器人在增强步行平衡方面的潜力。
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:4709次2020-09-28 10:55:18
-
浏览量:753次2024-01-31 14:13:12
-
浏览量:1501次2018-07-12 09:40:46
-
浏览量:805次2023-12-04 09:35:44
-
浏览量:882次2023-08-30 09:20:09
-
浏览量:2055次2018-11-18 18:56:57
-
浏览量:2053次2019-11-12 09:52:00
-
浏览量:2709次2018-07-13 20:08:12
-
浏览量:1430次2023-03-23 10:43:10
-
2019-11-08 09:10:03
-
浏览量:3900次2020-11-23 10:13:05
-
浏览量:1024次2023-07-04 14:31:19
-
浏览量:1826次2022-09-30 15:13:05
-
浏览量:1576次2019-08-02 14:58:25
-
浏览量:2285次2020-08-13 14:03:20
-
浏览量:839次2023-07-27 11:16:16
-
浏览量:730次2023-10-08 10:00:08
-
浏览量:1250次2023-03-17 11:17:32
-
浏览量:1435次2023-01-29 09:42:49






-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
艾

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
