

人工智能方法产生“运动智能”机器狗

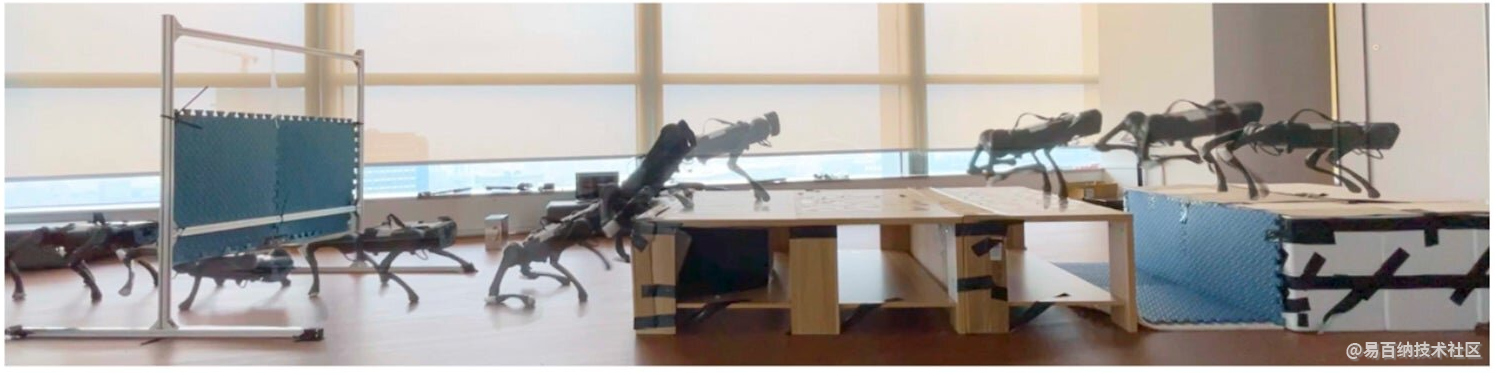
一张延时照片,展示了像狗一样的机器人如何能够自主地导航各种障碍物
有一天,当地震、火灾和洪水袭来时,第一反应者可能是成群结队的机器人救援犬,它们会冲进去帮助被困的灵魂。这些电池驱动的四足动物将使用计算机视觉来确定障碍物的大小,并使用像狗一样的敏捷技能来通过它们。
为了实现这一目标,斯坦福大学和上海智智研究所的人工智能研究人员表示,他们已经开发出一种新的基于视觉的算法,可以帮助机器狗 爬上高处的物体,跳过空隙,爬过门槛,挤过缝隙,然后直奔下一个挑战。这个算法代表了机器狗的大脑。“我们的四足机器人学会的自主性和复杂技能范围令人印象深刻,”计算机科学助理教授Chelsea Finn说。“我们用低成本、现成的机器人创造了它——实际上是两种不同的现成机器人。”关键的进步在于他们的机器狗是自主的,也就是说,它能够根据眼前的障碍来判断物理挑战,想象,然后执行一系列敏捷技能。
“我们正在做的是将感知和控制结合起来,使用安装在机器人上的深度摄像头的图像和机器学习来处理所有这些输入,并移动腿,以便越过、穿过和绕过障碍物,”该研究的作者Zipeng Fu说。
他们的机器狗并不是第一个表现出如此敏捷的机器狗,但它是第一个将自给自足与多种技能相结合的机器狗。“我们的机器人既有视觉又有自主能力——具备判断挑战的运动智力,并能根据当时的需求自我选择和执行跑酷技能,”Zipeng Fu说。
现有的学习方法通常基于复杂的奖励系统,必须对特定的物理障碍进行微调。因此,它们不能很好地扩展到新的或不熟悉的环境中。其他相关的方法学习使用真实世界的数据来模仿其他动物的敏捷技能。这些机器狗缺乏广泛的技能,也没有新型机器狗的视觉能力。现有的两种方法在计算上也是“滞后的”——换句话说,就是慢。
作者在研究中写道,这是第一个通过简单的奖励系统实现这些目标的开源应用程序,没有使用现实世界的参考数据。
为了取得成功,他们首先使用计算机模型合成和磨练算法,然后将其转移到两只现实世界的机器狗身上。接下来,在一个被称为强化学习的过程中,机器人试图以任何它们认为合适的方式前进,并根据它们的表现获得奖励。这就是算法如何最终学会应对新挑战的最 佳方法。
在实践中,大多数现有的强化学习奖励系统涉及太多的变量而无法有效,从而减慢了计算性能。这就是为什么机器狗跑酷的流线型奖励过程非常特别,尽管它也非常简单。
“这其实很简单,”Chelsea Finn说。“我们主要基于机器人向前移动的距离以及它所付出的努力。最终,机器人学会了更复杂的运动技能,使它能够领先。”
然后,该团队使用真实世界的机器狗进行了广泛的实验,以展示他们在特别具有挑战性的环境中使用机器狗的现成计算机,视觉传感器和动力系统的新敏捷性方法。
在原始数据中,这些经过改进的新机器狗能够爬过比自己高1.5倍多的障碍物,跳过比自己长1.5倍多的缝隙,在比自己高四分之三的障碍物下爬行,并倾斜身体以挤过比自己宽还细的狭缝。
接下来,该团队希望利用3D视觉和图形技术的进步,将现实世界的数据添加到模拟环境中,为他们的算法带来新的现实世界的自主性水平。
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:1757次2018-06-17 13:26:48
-
浏览量:737次2023-10-24 13:59:57
-
浏览量:4892次2021-07-30 17:02:58
-
浏览量:2373次2019-05-07 11:29:06
-
浏览量:583次2023-08-14 18:12:28
-
浏览量:777次2024-03-19 14:45:28
-
浏览量:2233次2017-12-25 00:02:34
-
浏览量:933次2023-02-24 09:24:44
-
浏览量:1291次2023-09-22 11:21:03
-
浏览量:2500次2017-12-15 09:49:26
-
浏览量:789次2023-08-24 10:03:33
-
浏览量:1701次2022-11-04 14:02:58
-
浏览量:1430次2018-09-12 10:05:13
-
浏览量:726次2023-09-27 14:17:16
-
浏览量:3242次2019-06-19 16:37:18
-
浏览量:1331次2022-12-06 19:29:47
-
浏览量:147次2023-08-23 09:02:52
-
浏览量:2697次2019-01-13 17:23:26
-
浏览量:41465次2019-07-12 15:51:05










-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
Debug

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
