

新方法帮助AI使用2D图像导航3D空间

照片是二维的,但自动驾驶汽车和其他技术必须在三维世界中导航。研究人员开发了一种新方法,帮助人工智能(AI)从2D图像中提取3D信息,使相机成为这些新兴技术的有用工具。
“现有的从2D图像中提取3D信息的技术很好,但还不够好,”一篇论文的合著者、北卡罗来纳州立大学电气和计算机工程副教授Tianfu Wu说。“我们的新方法称为MonoXiver,可以与现有技术结合使用,并使其更加准确。”
这项工作对自动驾驶汽车等应用特别有用。这是因为相机比其他用于导航3D空间的工具便宜,比如依靠激光测量距离的激光雷达。由于摄像头比其他技术更实惠,自动驾驶汽车的设计者可以安装多个摄像头,从而在系统中建立冗余。
但只有当自动驾驶汽车中的人工智能能够从相机拍摄的2D图像中提取3D导航信息时,这才有用。这就是MonoXiver的用武之地。
现有的从2D图像中提取3D数据的技术——比如吴和他的合作者开发的MonoCon技术——利用了“边界框”。具体来说,这些技术训练人工智能扫描2D图像,并在2D图像中的物体周围放置3D边界框,比如街道上的每辆车。
这些盒子是长方体,有八个点——想象一下鞋盒上的角。边界框帮助AI估计图像中物体的尺寸,以及每个物体与其他物体的关系。换句话说,边界框可以帮助AI确定汽车的大小,以及它与道路上其他汽车的相对位置。
然而,现有程序的边界框并不完善,通常无法包括2D图像中出现的车辆或其他物体的部分。
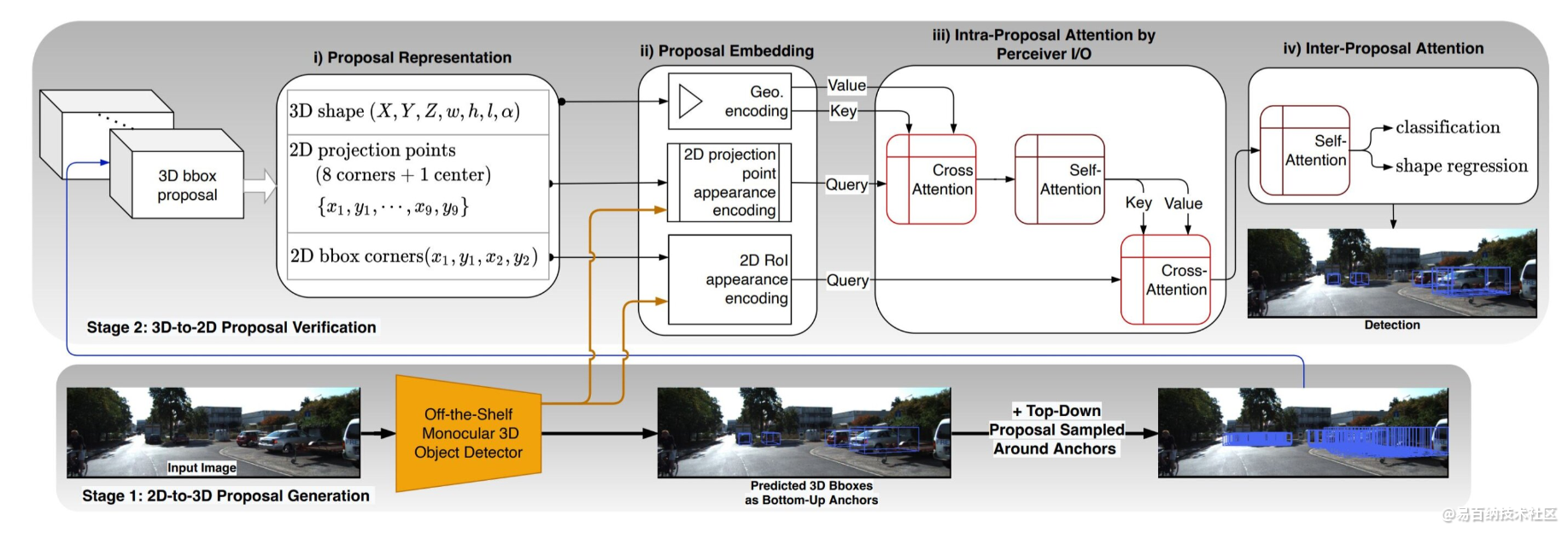
新的MonoXiver方法使用每个边界框作为起点或锚点,并让AI对每个边界框周围的区域进行第二次分析。第二次分析导致程序在锚的周围产生许多附加的边界框。
为了确定哪个辅助盒子最能捕捉到物体的“缺失”部分,AI会进行两次比较。一种比较是查看每个辅助框的“几何形状”,看看它是否包含与锚框中的形状一致的形状。另一种比较是查看每个次要框的“外观”,看它是否包含与锚框内的视觉特征相似的颜色或其他视觉特征。
“一个重要的进步是MonoXiver允许我们运行这种自上而下的采样技术——创建和分析二次边界盒——非常有效,”Wu说。
为了测量MonoXiver方法的准确性,研究人员使用两个2D图像数据集进行了测试:一个是完善的KITTI数据集,另一个是更具挑战性的大规模Waymo数据集。
Wu说:“我们将MonoXiver方法与MonoCon和其他两个现有的程序结合使用,这些程序旨在从2D图像中提取3D数据,MonoXiver显着提高了这三个程序的性能。”“当我们将MonoXiver与MonoCon结合使用时,我们获得了最 佳性能。”
“同样重要的是要注意,这种改进带来了相对较小的计算开销,”吴说。“例如,MonoCon本身可以以每秒55帧的速度运行。当你结合MonoXiver方法时,它会减慢到每秒40帧,这对于实际应用来说仍然足够快。”
“我们对这项工作感到兴奋,并将继续对其进行评估和微调,以用于自动驾驶汽车和其他应用,”吴说。
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:2250次2020-03-12 11:25:13
-
浏览量:4788次2021-02-18 14:05:35
-
浏览量:1557次2023-03-02 10:05:59
-
浏览量:2316次2020-02-29 09:35:15
-
浏览量:1068次2023-08-16 09:32:29
-
浏览量:6754次2021-05-17 16:48:29
-
浏览量:2598次2018-02-09 15:30:38
-
浏览量:2771次2018-01-21 11:57:12
-
浏览量:2306次2019-09-20 09:15:55
-
浏览量:4757次2020-11-12 14:15:40
-
浏览量:5774次2021-10-29 17:45:44
-
浏览量:1737次2023-02-08 09:58:54
-
浏览量:1179次2023-11-16 10:10:29
-
浏览量:3944次2020-12-01 10:06:07
-
浏览量:935次2023-10-21 13:46:38
-
浏览量:1621次2023-09-22 11:21:03
-
浏览量:2183次2018-01-21 09:52:40
-
浏览量:1174次2023-03-14 10:09:41
-
浏览量:995次2023-10-20 10:57:18






-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
Mary

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
