

新型AI系统提高自动驾驶预测精度

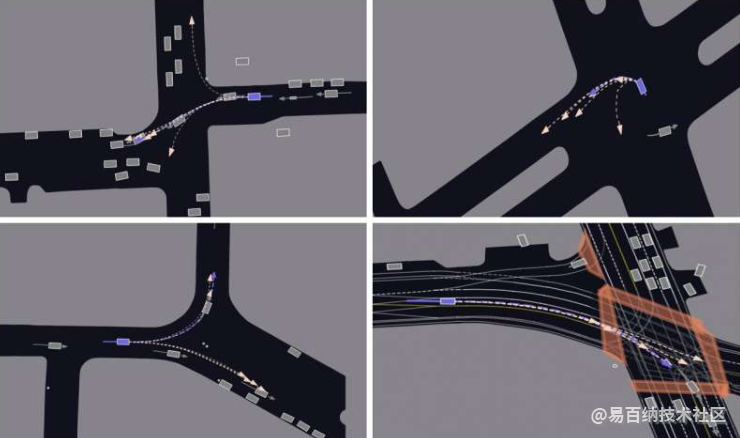
QCNet可以捕捉道路使用者的意图,准确预测周围车辆的多种可能运动
精确的实时预测附近车辆的运动或行人的未来轨迹对于安全的自动驾驶至关重要。香港城市大学(城大)领导的一个研究小组最近开发了一种新的人工智能系统,可以提高密集交通中的预测准确性,并将计算效率提高85%以上,为提高自动驾驶汽车的安全性提供了巨大的潜力。
领导这项研究的城大计算机科学系王建平教授解释了精确、实时预测在自动驾驶中的重要性,并强调即使是最小的延误和错误也可能导致灾难性事故。
然而,现有的行为预测解决方案往往难以正确理解驾驶场景,或者在预测中缺乏效率。这些解决方案通常涉及在车辆及其观测窗口向前移动时,对周围物体和环境的最新位置数据进行重新规范化和重新编码,即使最新位置数据基本上与之前的数据重叠。这将导致冗余计算和实时在线预测的延迟。
为了克服这些限制,王教授和她的团队提出了一个突破性的轨迹预测模型,称为“QCNet”,理论上可以支持流处理。它基于相对时空的定位原理,使预测模型具有“空间维上的旋转平移不变性”和“时间维上的平移不变性”等优良特性。
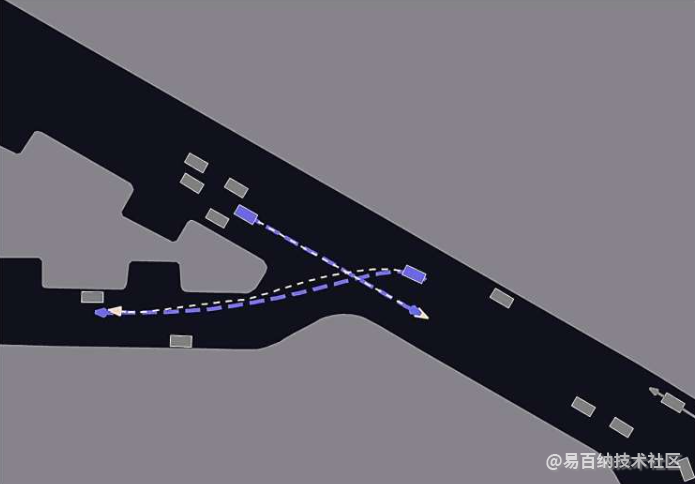
1 / 1QCNet可以理解道路规则和多个道路使用者之间的相互作用,预测符合地图和无碰撞的未来轨迹
这两个属性使得从驾驶场景中提取的位置信息是唯一的和固定的,而不管观看者在观看驾驶场景时的时空坐标系是什么。这种方法允许缓存和重用先前计算的坐标编码,从而使预测模型能够在理论上实时运行。
该团队还将道路使用者、车道和人行横道的相对位置纳入人工智能模型,以捕捉他们在驾驶场景中的关系和互动。这种对道路规则和多个道路使用者之间的相互作用的增强理解使模型能够在考虑道路使用者未来行为的不确定性的同时产生无碰撞预测。
为了评估QCNet的效果,研究小组利用了“Argoverse 1”和“Argoverse 2”这两个大规模的开源自动驾驶数据集和来自美国不同城市的高清地图。这些数据集被认为是行为预测最具挑战性的基准,包括超过32万个数据序列和25万个场景。
在测试中,QCNet在预测道路使用者未来动向方面既快速又准确,即使长期预测时间长达6秒。它在Argoverse 1上的333种预测方法和Argoverse 2上的44种预测方法中排名第一。此外,在涉及190个道路使用者和169个地图多边形(如车道和人行横道)的最密集交通场景中,QCNet将在线推理延迟从8ms显著降低到1ms,并将效率提高了85%以上。
王教授说:“通过将这项技术集成到自动驾驶系统中,自动驾驶汽车可以有效地了解周围环境,更准确地预测其他用户的未来行为,并做出更安全、更像人类的决定,为安全的自动驾驶铺平道路。我们计划将这项技术应用于自动驾驶的更多应用,包括交通模拟和类似人类的决策。”
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:2738次2020-09-30 10:12:42
-
浏览量:37724次2019-07-30 17:51:57
-
浏览量:1575次2019-06-26 13:40:10
-
浏览量:2108次2019-06-05 09:23:47
-
浏览量:2802次2017-12-09 16:47:48
-
浏览量:2067次2020-07-02 16:19:22
-
浏览量:4484次2021-01-28 17:24:58
-
浏览量:2544次2022-01-06 09:00:16
-
浏览量:1781次2019-06-10 09:31:33
-
浏览量:1703次2019-11-20 09:20:44
-
浏览量:1989次2020-07-01 17:44:50
-
浏览量:2190次2020-07-31 17:27:52
-
浏览量:4561次2020-11-05 13:46:51
-
浏览量:3045次2020-03-05 10:15:32
-
浏览量:3519次2019-11-13 09:07:39
-
浏览量:46206次2019-07-12 15:07:40
-
浏览量:4962次2021-03-15 16:24:28
-
浏览量:1384次2019-06-18 13:45:49
-
浏览量:1679次2022-01-21 09:00:31









-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖

一休摸鱼

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
