

探讨硬件实现对可进化机器人探索空间的影响


机器人制造商(RoboFab)。进化的机器人骨架(绿色)是3D打印的,机器人手臂装备了一个中央“头”(红色),然后将模块化的“器官”(深蓝色)附着在骨架上。弹簧夹使机械连接成为可能,电线将器官的电子元件连接到“头部”,以提供电力和控制信号。这个过程的各个方面:3D打印、组装、互联和电子,都对进化的探索空间施加了自己的限制。
进化机器人是机器人技术的一个子领域,旨在开发人工“有机体”,这些“有机体”可以改善它们的能力和身体结构,以应对周围环境,就像人类和动物进化一样,随着时间的推移调整它们的技能和外观。越来越多的机器人专家一直在尝试开发这些可进化的机器人系统,利用最近的人工智能(AI)进展。
该领域的一个关键挑战是在不影响其性能和能力的情况下,有效地将机器人从模拟环境转移到现实环境。约克大学、爱丁堡纳皮尔大学、阿姆斯特丹自由大学、西英格兰大学和桑德兰大学的研究人员发表在《机器人与人工智能前沿》杂志上的一篇论文调查了硬件对可进化机器人发展空间的影响。
为这项研究设计硬件的研究工程师迈克·安格斯(Mike Angus)在接受Tech Xplore采访时表示:“进化机器人最大的挑战之一是将其引入硬件领域,创造出真正有用的机器人。”
“ARE项目试图通过一个雄心勃勃的混合生态系统来推进这一目标,该生态系统结合了模拟和自主制造的机器人。这些机器人是采用一种新颖的半模块化方法建造的,其中机器人身体是3D打印的,并配备了模块化‘器官’形式的传感器和执行器,旨在获得比以前硬件机器人进化工作更丰富的形态空间。”
Angus和他的同事最近发表的论文受到两个关键观察的启发。首先,到目前为止,很少有关于进化机器人的研究深入探讨了与可进化机器人的物理实现相关的技术细节。其次,这些技术细节对于进化系统在现实世界中的表现至关重要,因此它们绝对值得进一步研究。
Angus解释说:“在为进化机器人开发硬件平台的过程中,我们发现进化过程和硬件实现之间的相互作用非常复杂,因此如果不详细考虑对方,任何一方都不能有效地设计。”
“因此,本文的主要目的是将这两个世界结合在一起,分享技术专家对硬件设计的看法,并将这些设计决策对进化过程的观察效果并置于一起,以突出硬件实现的每个方面如何对进化空间产生影响。”
Angus和他的同事们设计了一个新的进化机器人平台,可以使用自主技术,特别是3D打印技术,完全制造各种机器人“表型”。该系统将允许开发不同“物种”的机器人,具有广泛的形态和身体结构,而无需手动组装许多代机器人,这将既昂贵又耗时。
最终,该团队提出了一种半模块化的架构,将3D打印的自由形状的塑料骨架与夹上的模块化“器官”相结合。这些器官为机器人提供了基本的功能,如运动、传感、处理和动力。
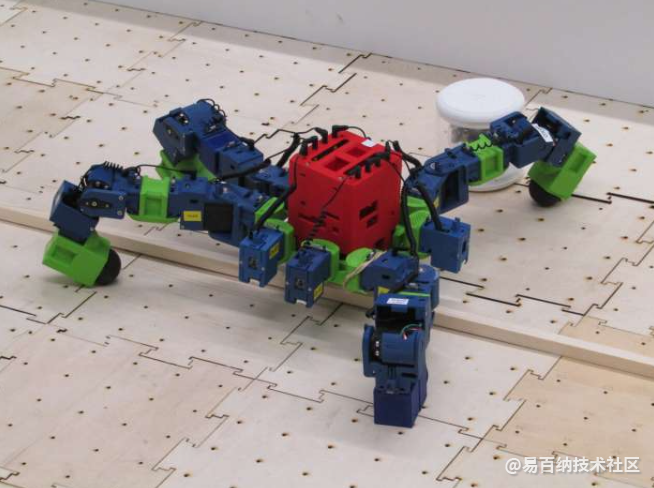
有腿和传感器的进化机器人。这种身体计划的可行性在很大程度上取决于底层电子系统的能力
Angus说:“我们的建筑中的身体形状和器官配置是由组成模式产生网络(CPPN)生成的,其参数随后进化。”
“创造一个可以真正制造这种机器人的系统需要做大量的工作,因为有无数的实际挑战需要应对,从3D打印过程本身到自动化装配过程,机械和电气互连,以及在各种不同机器人配置中可靠运行所需的底层电子设备。所有这些都导致了一个系统在很大程度上由解决这些实际挑战的方法来定义。”
Angus和他的同事们在研究他们提出的系统的性能时发现,它为进化机器人提供的探索空间非常有限,而且很难导航,因为物理限制使许多进化的设计无法实现。因此,他们也意识到,他们需要额外的方法来可靠地确保机器人在不断进化的群体中的可行性,其结果将反过来进一步影响进化过程的整体成功。
在他们的论文中,研究人员将这个问题概念化为他们所说的“可行表型空间”。这个术语是指理解一个可进化机器人平台的可能性的探索空间如何受到其硬件实现设置的约束的影响。
Angus说:“许多进化机器人研究都依赖于模拟,硬件限制很容易被忽略,而进化机器人的物理实现实验往往在形态结构上相对简单,因此‘可行的表型空间’仍然相对容易探索。”
“然而,当我们试图将进化机器人技术用于解决现实世界中的实际问题时,这一原则可以变得越来越重要,因为现实世界中的挑战更加复杂。”‘可行表型空间’不仅决定了进化机器人的潜在用途,还决定了进化过程中发现最 佳机器人身体计划时所面临的问题的难度。”
Angus和他的同事们最近的工作介绍了一个新的想法,可以指导新的进化机器人系统的发展,帮助研究人员确保他们在现实世界中表现良好。从根本上说,研究小组的观察表明,有效的进化机器人系统的发展高度依赖于它们的创造者有意识地塑造它们“可行的表型空间”的能力。
这个空间应该与特定机器人要处理的任务和任务保持一致。此外,支持机器人的进化算法应该有效地进行调整,以确保它们在确定的空间中表现良好。
从本质上讲,Angus和他的同事们表明,如果进化机器人专家在为他们的系统创建硬件和进化算法时采用传统的设计方法,那么他们进化实用机器人的能力将非常有限。另一方面,通过遵循他们提出的原则和理论观点,他们可以创造出更具适应性和高性能的进化机器人。
“我们未来的研究有三个可能的方向,所有的目标都是使进化算法在可行的表型空间内更有效地运作。”论文的合著者Edgar Buchanan Berumen说。
“我们希望开发一种新的方法来帮助进化机器人专家以正确的方式设计机器人平台,以减少进化景观中的硬件限制。第二个方向涉及设计一种基因型表示,允许进化最大化可行和多样化形态的数量。第三个方向是研究分析和确定最 佳约束处理策略,以帮助进化算法遍历可行的表型空间。”
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:896次2023-07-20 10:57:55
-
浏览量:2514次2018-01-19 22:01:16
-
浏览量:1369次2023-03-13 13:49:39
-
浏览量:765次2023-09-21 11:25:23
-
浏览量:629次2023-08-31 09:47:55
-
浏览量:1095次2023-03-02 10:10:01
-
浏览量:9576次2020-12-10 18:35:14
-
浏览量:788次2023-08-24 10:03:33
-
浏览量:2486次2018-07-09 10:15:59
-
浏览量:1337次2023-03-20 15:51:34
-
浏览量:1423次2023-03-23 10:43:10
-
浏览量:692次2023-08-24 15:30:23
-
浏览量:2376次2022-01-09 09:00:19
-
浏览量:1426次2023-04-21 09:00:28
-
浏览量:4457次2017-12-09 17:12:40
-
浏览量:3320次2017-12-11 20:16:19
-
浏览量:2572次2019-05-31 10:17:14
-
浏览量:1015次2023-03-20 15:23:45
-
浏览量:2016次2018-07-03 18:33:49

Mrs Wu
暂无个性签名~








-
17篇
-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
Mrs Wu

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
