

新的人工智能技术为机器人识别技能带来了巨大的提升

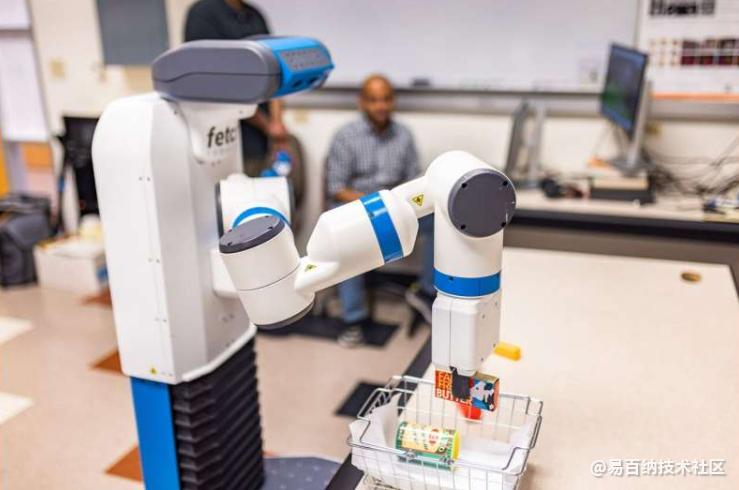
德克萨斯大学达拉斯分校智能机器人和视觉实验室的研究人员开发了一种新方法来训练Ramp,一种Fetch Robotics移动机械手机器人,通过重复交互识别物体。这个4英尺高的机器人有一个长长的机械臂,有七个关节和一个方形的“手”,有两个手指来抓物体。
在德克萨斯大学达拉斯分校的智能机器人与视觉实验室里,一个机器人在桌子周围移动一个装着黄油的玩具包。每推一下,机器人就会通过达拉斯德州大学计算机科学家团队开发的新系统学习识别物体。该团队在7月10日至14日在韩国大邱举行的机器人:科学与系统会议上发表了他们的研究论文。
新系统允许机器人多次推动物体,直到收集到一系列图像,这反过来又使系统能够分割序列中的所有物体,直到机器人识别物体。以前的方法依赖于机器人的一次推动或抓住来“学习”物体。
机器人能做饭、打扫餐桌和清空洗碗机的那一天还很遥远。但该研究小组在机器人系统方面取得了重大进展,该系统利用人工智能帮助机器人更好地识别和记忆物体,论文的资深作者Yu Xiang博士说:“如果你让机器人拿起杯子或给你送一瓶水,机器人需要识别这些物体。”
UTD研究人员的技术旨在帮助机器人检测在家庭等环境中发现的各种各样的物体,并归纳或识别常见物品(如水瓶)的相似版本,这些物品有不同的品牌、形状或大小。
在Yu Xiang的实验室里,有一个储物箱,里面装满了普通食品的玩具包装,比如意大利面、番茄酱和胡萝卜,这些都是用来训练实验室机器人Ramp的。Ramp是Fetch Robotics的移动机械手机器人,它站在一个圆形的移动平台上,大约有4英尺高。坡道有一个长机械臂,有七个关节。最后是一个方形的“手”,有两个手指来抓东西。
Yu Xiang说:“机器人学习识别物品的方式与儿童学习与玩具互动的方式类似。”
“在推动物体后,机器人学会了识别它,”Yu Xiang说。“有了这些数据,我们训练人工智能模型,这样下次机器人看到物体时,就不需要再推它了。当它第二次看到这个物体时,它就会把它捡起来。”
研究人员的新方法是,机器人将每个项目推15到20次,而以前的交互式感知方法只使用一次推。Yu Xiang说,多次推动使机器人能够用RGB-D相机拍摄更多照片,其中包括一个深度传感器,以更详细地了解每个项目。这减少了出错的可能性。
识别、区分和记忆物体的任务,称为分割,是机器人完成任务所需的主要功能之一。
“据我们所知,这是第一个利用长期机器人交互进行物体分割的系统,”Yu Xiang说。
计算机科学博士生Ninad Khargonkar说,参与这个项目帮助他改进了帮助机器人做决定的算法。
“开发一种算法并在抽象数据集上进行测试是一回事;但在现实世界的任务中进行测试是另一回事。”“看到现实世界的表现,这是一个关键的学习经历。”
研究人员的下一步是改进其他功能,包括计划和控制,这可能使诸如分类回收材料之类的任务成为可能。
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:4045次2018-02-27 19:15:34
-
浏览量:1040次2023-08-24 10:03:33
-
浏览量:1847次2019-06-13 11:39:09
-
浏览量:2243次2019-12-05 15:05:25
-
浏览量:1003次2023-08-29 09:48:16
-
浏览量:2805次2018-09-20 13:41:07
-
浏览量:1927次2018-09-20 13:41:08
-
浏览量:1443次2023-01-12 14:53:11
-
浏览量:1314次2023-07-04 14:11:52
-
浏览量:1953次2018-05-13 17:31:06
-
浏览量:2941次2019-01-13 17:23:26
-
浏览量:41730次2019-07-12 15:51:05
-
浏览量:2946次2023-05-18 10:53:13
-
浏览量:2685次2017-12-15 09:49:26
-
浏览量:1645次2022-12-06 19:29:47
-
浏览量:2439次2017-12-01 17:23:13
-
浏览量:3146次2018-06-30 23:17:49
-
浏览量:984次2023-11-07 15:27:03
-
浏览量:5483次2021-01-12 09:39:20









-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖

Ocean

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
