

资讯文章
尖端无人机技术:在GPS拒绝环境中动态目标跟踪的新方法

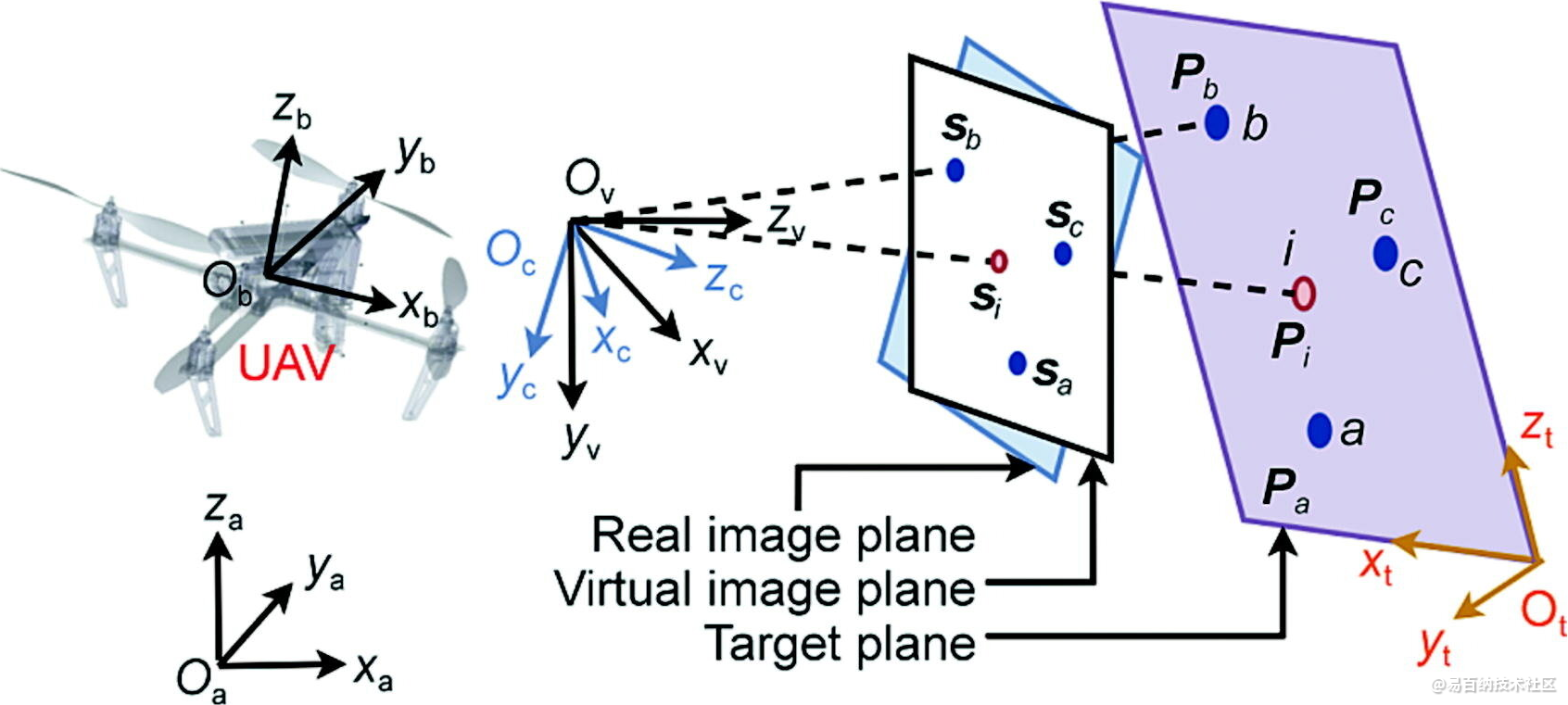
无人机系统的参考坐标框架
发表在《工程学》上的一项研究介绍了一种新型的基于图像的视觉伺服(IBVS)方法,用于无人机(UAV)在拒绝GPS的环境中跟踪动态目标。
该研究文章题为“不可预测干扰下无人机的动态目标跟踪”,提出了一种全面的方法,解决了在存在外部干扰的情况下估计目标速度、图像深度估计和跟踪稳定性的挑战。
该方法利用构造的虚拟摄像机推导出欠驱动无人机的简化和解耦图像动力学。通过考虑动态目标不可预测的旋转和速度引起的不确定性,研究人员开发了一种独特的图像深度模型,该模型扩展了IBVS方法以跟踪任意方向的旋转目标。该模型可确保准确的图像特征跟踪和旋转目标的平滑轨迹。
为了估计无人机与动态目标之间的相对速度,设计了一个速度观测器。该观察器消除了对平移速度测量的需要,并减轻了由含噪声测量引起的控制颤振。此外,还引入了基于积分的滤波器来补偿不可预测的环境干扰,从而提高了无人机的抗干扰能力。
速度观测器和IBVS控制器的稳定性已经使用李雅普诺夫方法进行了严格的分析。通过对比仿真和多级实验,验证了所提方法在动态旋转目标下的跟踪稳定性、抗扰动能力和跟踪鲁棒性。
本研究的主要贡献包括:
- 新型图像深度模型:研究人员提出了一种独特的图像深度模型,无需跟踪目标的旋转信息即可准确估计图像深度。该模型使所提出的IBVS控制器能够应用来跟踪任意方向的动态旋转目标。
- 速度观测器:设计了一个专用的速度观测器,用于估计无人机和动态目标之间的相对速度。这使得所提出的方法可用于拒绝GPS的环境,同时减轻由含噪声的速度测量引起的控制颤振。
- 基于积分的滤波器:已经开发出一种基于积分的滤波器来估计和补偿不可预测的干扰,包括动态目标的加速和环境干扰。这增强了无人机处理动态目标的未知运动和外部干扰的能力。
综上所述,本研究提出了一种动态IBVS方法,该方法在存在不可预测的干扰时显着提高了无人机的跟踪性能。通过利用速度观测器、新型图像深度模型和基于积分的滤波器,所提方法表现出增强的跟踪稳定性、抗干扰能力和鲁棒性。
利用李雅普诺夫理论对该方法的稳定性进行了深入分析,并进行了仿真和实验以验证其有效性。
声明:本文内容由易百纳平台入驻作者撰写,文章观点仅代表作者本人,不代表易百纳立场。如有内容侵权或者其他问题,请联系本站进行删除。
红包
点赞
收藏
评论
打赏
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
评论
0个
手气红包
 暂无数据
暂无数据相关专栏
-
浏览量:1305次2023-03-02 10:05:59
-
浏览量:1998次2024-03-31 22:08:36
-
浏览量:2113次2018-03-23 14:25:17
-
浏览量:3305次2020-01-06 10:51:11
-
浏览量:713次2023-09-02 09:12:16
-
浏览量:1292次2023-05-13 21:35:31
-
浏览量:1919次2022-03-30 17:09:52
-
浏览量:2813次2020-11-16 10:39:09
-
浏览量:3111次2020-10-29 09:56:12
-
浏览量:1918次2018-11-28 12:30:32
-
浏览量:1290次2023-09-22 11:21:03
-
浏览量:570次2023-09-21 10:29:05
-
浏览量:3433次2018-04-03 15:23:07
-
浏览量:2968次2020-05-08 10:44:24
-
浏览量:760次2023-08-31 09:28:26
-
浏览量:867次2023-03-14 10:09:41
-
浏览量:711次2023-10-20 10:57:18
-
浏览量:673次2023-03-20 14:37:33
-
浏览量:1423次2023-03-23 10:43:10



置顶时间设置
结束时间
删除原因
-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
打赏作者
hury
您的支持将鼓励我继续创作!
打赏金额:
¥1
¥5
¥10
¥50
¥100
支付方式:
 微信支付
微信支付
举报反馈
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
发布时间设置
发布时间:
请选择发布时间设置
是否关联周任务-专栏模块
审核失败
失败原因
请选择失败原因
备注
请输入备注



关注公众号
联系我们
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
回顶部
