

离无需幕后控制的机器人又近了一步

具有反冲行为的推门的可行性验证
在过去的十年里,我们目睹了机器人技术的显著发展,机器人模型可以像人类一样走路、说话和做手势,承担从移动重型机械到精细操纵微小物体的任务,并在崎岖不平的地形上用两条腿或四条腿保持平衡。
尽管最新的机器人令人印象深刻,但它们的成就在很大程度上是特定任务编程或人类远程指令的结果。
苏黎世联邦理工学院(ETH Zurich)的研究人员开发了一个程序,可以帮助机器人完成不依赖于“预先录制的专家演示”或“密集设计的奖励”的活动。
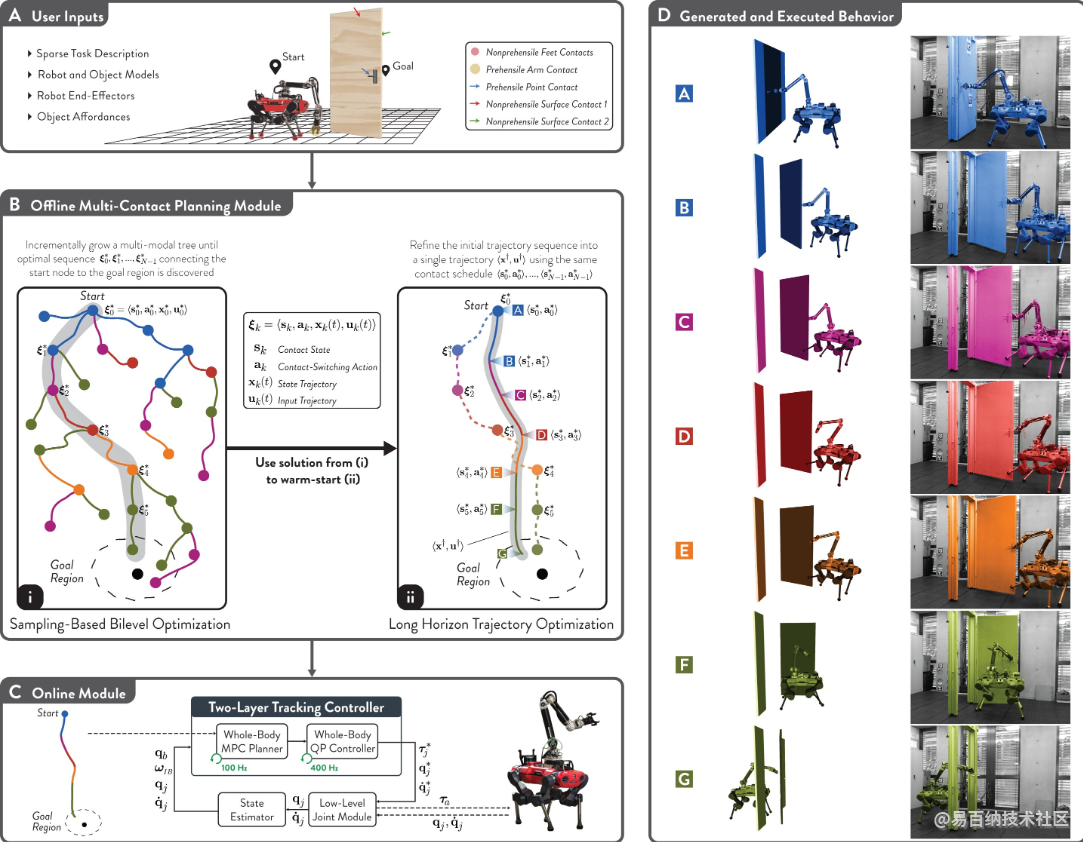
他们设计了一种方法,使机器人能够“快速发现解决任务的可行且接近最 佳的多模态序列”。换句话说,它们提供了一个环境,在这个环境中,机器人可以在最少的人类操作员指导下实现目标。
这项研究发表在8月16日的《科学机器人》杂志上。这篇论文题为“腿式位置操纵的多功能多接触规划和控制”,由苏黎世联邦理工学院(ETH Zurich)机器人系统实验室的让-皮埃尔·斯莱曼(Jean-Pierre Sleiman)、Farbod Farshidian和马可·亨特(Marco Hunter)撰写。
“考虑到机器人和物体的高级描述,以及通过稀疏目标编码的任务规范,”Sleiman说,“我们的规划器就能从整体上发现机器人应该如何移动,应该施加什么样的力,应该使用什么样的肢 体,以及应该在何时何地与物体建立或断开接触。”
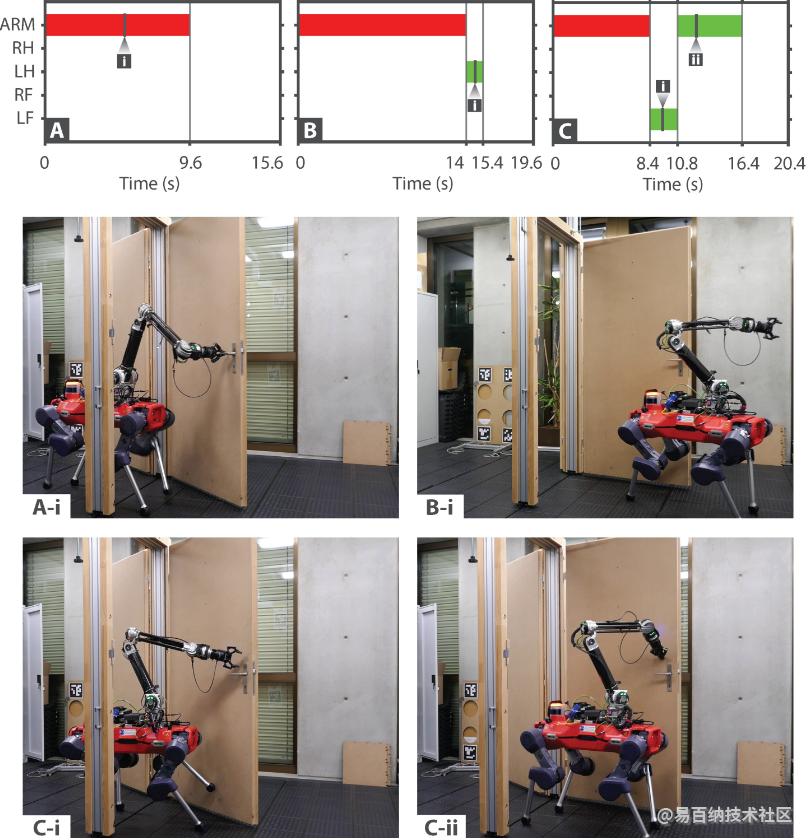
演示视频显示,ANYbotics的四足机器人ANYmal掌握了打开洗碗机的门,并熟练地打开一扇有重量的门,并用一条腿保持门的打开状态,同时通过操作。
“这个框架可以很容易地适应不同种类的移动机械手,”Sleiman说。
过去几年,机器人的发展取得了巨大的进步。波士顿动力公司是机器人领域的领军企业,于2013年创建了Atlas。凭借立体视觉和精细的运动能力,它可以在恶劣的环境中保持平衡。它最终得到了改进,可以进出车辆,开门和处理电力设备。Agility Robotics的Cassie在2016年展示了出色的行走和跑步能力。
2017年,一个能模仿人类手势和行为的栩栩如生的Sophia被派往养老院帮助老人,并与孩子们一起玩耍。2019年,OpenAI的Dactyl展示了高度先进的触觉操作:在经过开发人员估计需要1.3万年才能完成的培训课程后,单手Dactyl可以轻松地操纵魔方并解决3D组合难题,自1974年发布以来,这一难题一直困扰着数百万用户,只需4分钟。
多触点定位操作的规划和控制架构
最近几年,波士顿动力公司(Boston Dynamics)又推出了四条腿的Spot机器人,它可以行走三英里,爬坡,克服障碍,完成特殊任务。Ameca被认为是最逼真的机器人之一,即使不是最逼真的机器人,也能流畅地进行对话,并产生非常像人类的面部表情和手势。
苏黎世联邦理工学院(ETH Zurich)在机器人发展的下一个阶段迈出了关键的一步,它将继承前人的伟大成就,消除或者至少大大减少人类在幕后控制机器人的需要。
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:1160次2023-11-13 12:34:02
-
浏览量:995次2023-11-13 11:08:23
-
2023-04-14 13:44:09
-
浏览量:1137次2023-07-27 11:16:16
-
浏览量:1110次2023-03-09 16:59:13
-
浏览量:1433次2023-03-21 08:54:44
-
浏览量:36774次2019-07-13 11:52:42
-
浏览量:1099次2023-08-30 18:29:45
-
浏览量:2137次2023-03-09 15:39:13
-
浏览量:1095次2023-12-11 14:51:22
-
浏览量:1027次2023-07-26 09:40:01
-
浏览量:1725次2024-01-24 16:33:36
-
浏览量:1790次2024-02-04 10:08:58
-
浏览量:1727次2023-03-23 10:43:10
-
浏览量:2083次2020-04-24 10:38:46
-
浏览量:1256次2023-04-17 16:16:11
-
浏览量:2174次2023-03-14 09:12:42
-
浏览量:1093次2023-04-20 08:54:12
-
浏览量:2475次2023-02-25 10:56:42




-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
哈哈哈哈

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
