

可增强机器人的触觉低成本传感器

在操纵和抓取过程中达到人类水平的灵活性一直是机器人技术的长期目标。要做到这一点,机器人必须拥有可靠的触觉信息和力感。最近发表在IEEE机器人与自动化快报上的一项研究描述了L3 F-TOUCH传感器,该传感器增强了经典触觉传感器的力感应能力。该传感器重量轻,成本低,并且是无线的,这使得它成为改造现有机器人手和抓手的一个经济实惠的选择。
人的手可以感知压力、温度、质地和疼痛。此外,人的手可以根据物体的形状、大小、重量和其他物理特性来区分物体。目前许多机器人的手或抓握器甚至不能接近人类的手,因为它们没有集成的触觉能力,使处理物体变得复杂。
如果不了解相互作用力和被处理物体的形状,机器人的手指就不会有任何“触感”,物体很容易从机器人的手指中滑出,如果它们是易碎的,甚至会被压碎。
这项研究由伦敦玛丽女王大学的Kaspar Althoefer教授领导,展示了新的L3 f - touch高分辨率指尖传感器,其中L3代表轻量级,低成本,无线通信。传感器可以测量物体的几何形状,并确定与物体相互作用的力。与其他传感器通过相机图像获取的触觉信息来估计相互作用力不同,L3 F-TOUCH直接测量相互作用力,实现了更高的测量精度。
与其竞争对手通过重建其软弹性体变形的相机图像来估计所经历的相互作用力不同,L-3 F-TOUCH通过集成的机械悬架结构和反射镜系统直接测量相互作用力,从而实现更高的测量精度和更宽的测量范围。
Kaspar Althoefer教授表示:“该传感器的物理设计旨在将力测量与几何信息解耦。因此,与竞争对手相比,感应到的三轴力不受接触几何的影响。通过嵌入式无线通信,该传感器在与机械手的可集成性方面也优于竞争对手。”
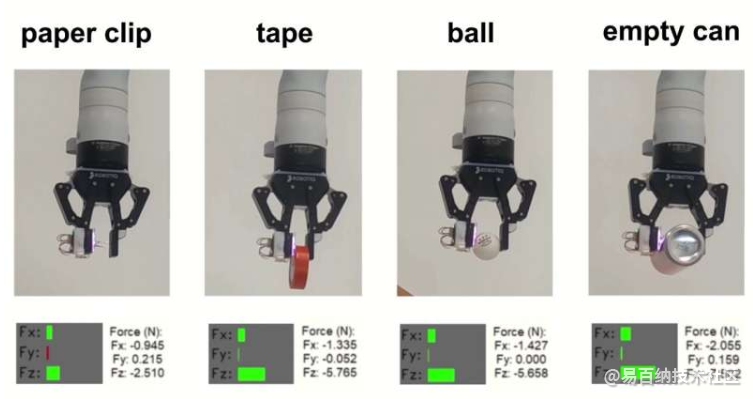
当传感器接触表面时,紧凑的悬浮结构使弹性体(一种类似橡胶的材料,在外力作用下变形以测量高分辨率接触几何形状)在接触时发生位移。为了理解这些数据,弹性体的位移是通过检测一个特殊标记(所谓的ARTag)的运动来跟踪的,通过校准过程,我们可以测量沿着三个主要轴(x、y和z)的接触力。
“我们将把未来的工作重点放在扩展传感器的能力上,不仅可以测量沿三个主要轴的力,还可以测量旋转力,如扭转力,这些力在螺钉紧固过程中可能会经历,同时保持精确和紧凑。这些进步可以使更动态和敏捷的机器人在操作任务中具有触觉,甚至在人机交互环境中,如患者康复或老年人的身体支持,”Althoefer教授补充说。
这一突破可能为未来更先进、更可靠的机器人技术铺平道路,因为有了L3 F-TOUCH传感器,机器人可以有触觉,使它们更有能力处理物体和执行复杂的操作任务。
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:1388次2023-03-20 10:56:09
-
浏览量:1379次2023-02-16 19:14:05
-
浏览量:3067次2020-11-13 10:52:46
-
浏览量:716次2023-08-09 14:00:57
-
浏览量:746次2024-01-31 14:13:12
-
浏览量:1572次2019-08-02 14:58:25
-
浏览量:2486次2018-07-09 10:15:59
-
浏览量:799次2023-12-04 09:35:44
-
浏览量:2031次2022-12-08 11:08:13
-
浏览量:1802次2023-03-14 14:08:09
-
浏览量:798次2023-12-11 14:51:22
-
浏览量:3610次2020-10-22 11:19:14
-
2019-11-08 09:10:03
-
浏览量:586次2024-01-30 10:05:53
-
浏览量:1238次2024-02-20 11:32:36
-
浏览量:2603次2020-07-30 09:14:09
-
浏览量:2493次2018-01-06 21:01:01
-
浏览量:1732次2019-11-15 08:47:19
-
浏览量:3139次2020-10-20 09:17:04









-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖

Ocean

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
