

可以有效学习控制机器人的机器学习技术

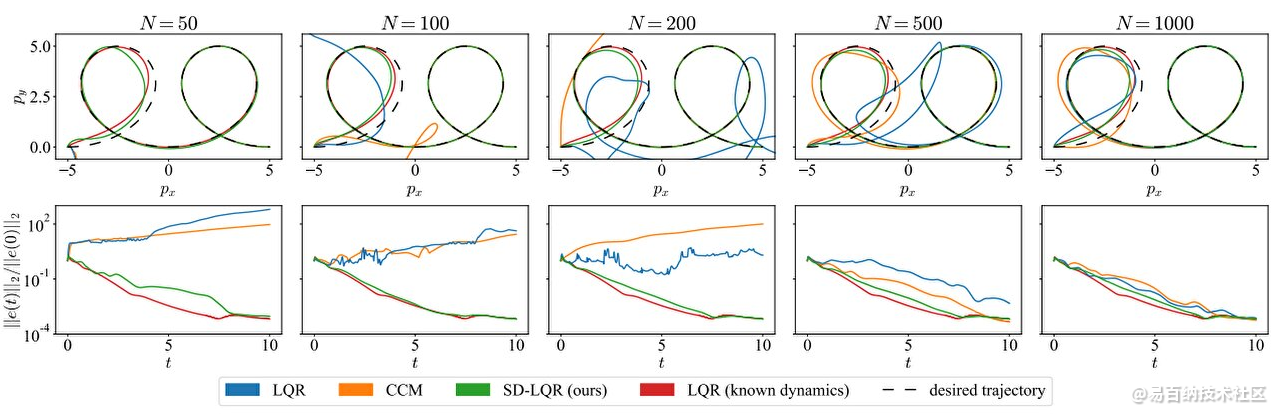 PVTOL系统在双环路轨迹上的轨迹跟踪结果。顶行定性描述了每种方法的闭环轨迹,并叠加了所需的轨迹(黑色虚线)。底行显示一段时间内的规范化跟踪误差。绘图从左到右进行,标记的训练数据数量不断增加 N 个。
PVTOL系统在双环路轨迹上的轨迹跟踪结果。顶行定性描述了每种方法的闭环轨迹,并叠加了所需的轨迹(黑色虚线)。底行显示一段时间内的规范化跟踪误差。绘图从左到右进行,标记的训练数据数量不断增加 N 个。
麻省理工学院和斯坦福大学的研究人员设计了一种新的机器学习方法,可用于在条件可能快速变化的动态环境中更有效地控制机器人,如无人机或自动驾驶汽车。
这种技术可以帮助自动驾驶汽车学会补偿湿滑的路况以避免打滑,允许机器人自由飞行者在太空中拖曳不同的物体,或者使无人机能够紧跟下坡滑雪者,尽管受到强风的冲击。
研究人员的方法将控制理论中的某些结构纳入学习模型的过程中,从而产生一种控制复杂动力学的有效方法,例如由风对飞行器轨迹的影响引起的动力学。考虑此结构的一种方法是作为提示,可以帮助指导如何控制系统。
“我们工作的重点是学习系统动力学中的内在结构,可以用来设计更有效,更稳定的控制器,”麻省理工学院机械工程系和数据,系统和社会研究所(IDSS)的Esther和Harold E. Egerton助理教授Navid Azizan说,也是信息和决策系统实验室(LIDS)的成员。“通过共同学习系统的动力学和从数据中获取这些独特的面向控制的结构,我们能够自然地创建在现实世界中更有效地运行的控制器。
“我们工作的重点是学习系统动力学中的内在结构,可以用来设计更有效,更稳定的控制器,”麻省理工学院机械工程系和数据,系统和社会研究所(IDSS)的Esther和Harold E. Egerton助理教授Navid Azizan说,也是信息和决策系统实验室(LIDS)的成员。“通过共同学习系统的动力学和从数据中获取这些独特的面向控制的结构,我们能够自然地创建在现实世界中更有效地运行的控制器。
“这项工作试图在识别系统中的结构和从数据中学习模型之间取得平衡,”斯坦福大学研究生Spencer M. Richards说。“我们的方法受到机器人专家如何使用物理学为机器人推导出更简单模型的启发。对这些模型的物理分析通常会产生一个用于控制目的的有用结构,如果您只是试图天真地将模型拟合到数据,您可能会错过这种结构。相反,我们尝试从指示如何实现控制逻辑的数据中识别出类似的有用结构。
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:3522次2017-12-08 22:05:36
-
浏览量:1534次2023-03-17 11:17:32
-
浏览量:1024次2023-03-14 13:50:59
-
浏览量:920次2023-08-23 14:42:57
-
浏览量:1433次2023-03-21 08:54:44
-
浏览量:2174次2023-03-14 09:12:42
-
浏览量:1110次2023-03-09 16:59:13
-
浏览量:1008次2023-08-24 15:30:23
-
浏览量:2083次2020-04-24 10:38:46
-
浏览量:1589次2023-03-13 13:49:39
-
2023-04-14 13:44:09
-
浏览量:174次2023-08-16 18:28:43
-
浏览量:1878次2023-04-14 14:37:29
-
浏览量:1657次2023-01-28 13:55:15
-
浏览量:849次2023-08-22 17:58:21
-
浏览量:1252次2023-02-03 09:34:05
-
浏览量:1070次2023-09-21 11:25:23
-
浏览量:9370次2020-12-11 16:05:44
-
浏览量:871次2023-08-31 09:47:55






-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
艾

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
