

使用 yolov5 进行目标检测的训练操作 小记

文章目录
1. 数据配置
1.1. 工具安装
Labelimg 是一款开源的数据标注工具,可以标注三种格式:
- VOC标签格式,保存为xml文件
- yolo标签格式,保存为txt文件
- createML标签格式,保存为json格式
安装也比较简单:
$ pip3 install labelimg -i https://pypi.tuna.tsinghua.edu.cn/simple1.2. 数据准备
1.2.1. 建立文件夹和基础文件
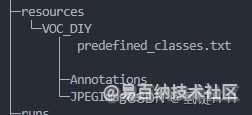
先在主目录建立一个 resources 文件夹,专门用来存放总的训练数据
然后在该目录下建立一个 VOC_DIY 文件夹,用于这次训练的数据文件夹
在这里面建立一个 JPEGImages 文件夹存放需要打标签的图片文件
再建立一个 Annotations 文件夹存放标注的标签文件
最后创建一个名为 predefined_classes.txt 的 txt 文件来存放所要标注的类别名称
最终结构如下:
1.2.2. 编辑类别种类
假设任务是需要一个检测人和手表的任务,那么目标只有两个
先编辑 predefined_classes.txt 文件,定义的类别种类:
person
watche1.2.3. 放置标注图片
然后把待标注的图片放在 JPEGImages 文件夹中,这里演示只用10张:
实际应用时需要更多更好的数据,数量和质量都很重要
1.3. 数据标注
路径切换到yolov5\resources\VOC_DIY数据集文件夹中来 在该地址启动 labelimg
$ labelimg JPEGImages predefined_classes.txt基础的配置和使用参考网上随便搜一下就好了,如《labelImg使用教程》
主要设置:
- Auto Save mode:切换到下一张图的时候,会自动保存标签。
- Display Labels:显示标注框和标签
- Advanced Mode:标注的十字架悬浮在窗口上

标注好了之后,可以在 Annotations 文件夹中查看:
1.4. 数据转换
目标检测的数据集资源标签的格式一般都是VOC(xml格式)
刚刚labelimg默认配置的也是,不过也可以自己设置为 yolo(txt格式)
现在就需要对xml格式的标签文件转换为txt文件
同时将数据集需要划分为训练集和验证集
路径切回工程主目录,建立一个 voc2yolo.py 文件实现以上所述功能
import xml.etree.ElementTree as ET
import os
import random
from shutil import rmtree, copyfile
classes = ["person", "watche"]
TRAIN_RATIO = 0.8
VOC_PATH = 'resources/VOC_DIY/'
CLEAR_HISTORICAL_DATA = True
def convert(size, box):
dw = 1. / size[0]
dh = 1. / size[1]
x = (box[0] + box[1]) / 2.0
y = (box[2] + box[3]) / 2.0
w = box[1] - box[0]
h = box[3] - box[2]
x = x * dw
w = w * dw
y = y * dh
h = h * dh
return (x, y, w, h)
def convert_annotation(image_id):
in_file = open(VOC_PATH + 'Annotations/%s.xml' % image_id)
out_file = open(VOC_PATH + 'YOLOLabels/%s.txt' % image_id, 'w')
tree = ET.parse(in_file)
root = tree.getroot()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text)
for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult) == 1:
continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text), float(xmlbox.find('ymax').text))
bb = convert((w, h), b)
out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')
in_file.close()
out_file.close()
work_sapce_dir = os.path.join(os.getcwd(), VOC_PATH).replace('/','\\')
annotation_dir = os.path.join(work_sapce_dir, "Annotations/").replace('/','\\')
image_dir = os.path.join(work_sapce_dir, "JPEGImages/").replace('/','\\')
yolo_labels_dir = os.path.join(work_sapce_dir, "YOLOLabels/").replace('/','\\')
yolov5_images_dir = os.path.join(work_sapce_dir, "images/").replace('/','\\')
yolov5_labels_dir = os.path.join(work_sapce_dir, "labels/").replace('/','\\')
yolov5_images_train_dir = os.path.join(yolov5_images_dir, "train/").replace('/','\\')
yolov5_images_test_dir = os.path.join(yolov5_images_dir, "val/").replace('/','\\')
yolov5_labels_train_dir = os.path.join(yolov5_labels_dir, "train/").replace('/','\\')
yolov5_labels_test_dir = os.path.join(yolov5_labels_dir, "val/").replace('/','\\')
dir_list = [yolo_labels_dir, yolov5_images_dir, yolov5_labels_dir,
yolov5_images_train_dir, yolov5_images_test_dir,
yolov5_labels_train_dir, yolov5_labels_test_dir]
for dir in dir_list:
if not os.path.isdir(dir):
os.mkdir(dir)
elif CLEAR_HISTORICAL_DATA is True:
rmtree(dir)
os.mkdir(dir)
print("Clean {}".format(dir))
train_file = open(os.path.join(work_sapce_dir, "yolov5_train.txt"), 'w')
test_file = open(os.path.join(work_sapce_dir, "yolov5_val.txt"), 'w')
train_file.close()
test_file.close()
train_file = open(os.path.join(work_sapce_dir, "yolov5_train.txt"), 'a')
test_file = open(os.path.join(work_sapce_dir, "yolov5_val.txt"), 'a')
list_imgs = os.listdir(image_dir)
list_imgs.sort()
random.shuffle(list_imgs)
imgs_len = len(list_imgs)
for i in range(0, imgs_len):
path = os.path.join(image_dir, list_imgs[i])
if os.path.isfile(path):
image_path = image_dir + list_imgs[i]
voc_path = list_imgs[i]
(nameWithoutExtention, extention) = os.path.splitext(os.path.basename(image_path))
(voc_nameWithoutExtention, voc_extention) = os.path.splitext(os.path.basename(voc_path))
annotation_name = nameWithoutExtention + '.xml'
annotation_path = os.path.join(annotation_dir, annotation_name)
label_name = nameWithoutExtention + '.txt'
label_path = os.path.join(yolo_labels_dir, label_name)
if i <= TRAIN_RATIO * imgs_len:
if os.path.exists(annotation_path):
train_file.write(image_path + '\n')
convert_annotation(nameWithoutExtention)
copyfile(image_path, yolov5_images_train_dir + voc_path)
copyfile(label_path, yolov5_labels_train_dir + label_name)
else:
if os.path.exists(annotation_path):
test_file.write(image_path + '\n')
convert_annotation(nameWithoutExtention)
copyfile(image_path, yolov5_images_test_dir + voc_path)
copyfile(label_path, yolov5_labels_test_dir + label_name)
print("\r进度:{:3d} %".format(int((i + 1) / imgs_len * 100)), end='', flush=True)
train_file.close()
test_file.close()
input("\n输入任意键退出")
运行该文件就可以得到所需的训练集和验证集了
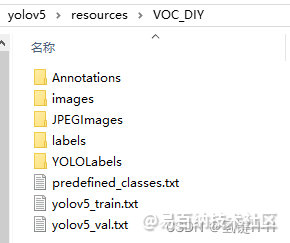
1.5. 修改配置
1.5.1. 修改数据配置文件
编辑data目录下的相应的yaml文件
找到目录下的voc.yaml文件,将该文件复制一份,将复制的文件重命名为watche.yaml
根据项目实况保留有用信息:
path: ./resources/VOC_DIY
train: # train images (relative to 'path') 8 images
- images/train
val: # val images (relative to 'path') 2 images
- images/val
# Classes
nc: 2 # number of classes
names: ['person', 'watche'] # class names
1.5.2. 修改模型配置文件
由于该项目使用的是yolov5s.pt这个预训练权重,所以要使用models目录下的yolov5s.yaml文件中的相应参数
将yolov5s.yaml文件复制一份,然后将其重命名为yolov5_watche.yaml
根据项目实况改个;类型数量就好了:
# nc: 80 # number of classes
nc: 2 # number of classes
2. 训练配置
训练是利用 train.py 文件
2.1. 参数设置
同《YOLOv5 使用入门》一样,主要还是看参数设置:
def parse_opt(known=False):
parser = argparse.ArgumentParser()
parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='initial weights path')
parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
parser.add_argument('--hyp', type=str, default=ROOT / 'data/hyps/hyp.scratch-low.yaml', help='hyperparameters path')
parser.add_argument('--epochs', type=int, default=300)
parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs, -1 for autobatch')
parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='train, val image size (pixels)')
parser.add_argument('--rect', action='store_true', help='rectangular training')
parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
parser.add_argument('--noval', action='store_true', help='only validate final epoch')
parser.add_argument('--noautoanchor', action='store_true', help='disable AutoAnchor')
parser.add_argument('--noplots', action='store_true', help='save no plot files')
parser.add_argument('--evolve', type=int, nargs='?', const=300, help='evolve hyperparameters for x generations')
parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
parser.add_argument('--optimizer', type=str, choices=['SGD', 'Adam', 'AdamW'], default='SGD', help='optimizer')
parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
parser.add_argument('--project', default=ROOT / 'runs/train', help='save to project/name')
parser.add_argument('--name', default='exp', help='save to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
parser.add_argument('--quad', action='store_true', help='quad dataloader')
parser.add_argument('--cos-lr', action='store_true', help='cosine LR scheduler')
parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
parser.add_argument('--patience', type=int, default=100, help='EarlyStopping patience (epochs without improvement)')
parser.add_argument('--freeze', nargs='+', type=int, default=[0], help='Freeze layers: backbone=10, first3=0 1 2')
parser.add_argument('--save-period', type=int, default=-1, help='Save checkpoint every x epochs (disabled if < 1)')
parser.add_argument('--local_rank', type=int, default=-1, help='DDP parameter, do not modify')
# Weights & Biases arguments
parser.add_argument('--entity', default=None, help='W&B: Entity')
parser.add_argument('--upload_dataset', nargs='?', const=True, default=False, help='W&B: Upload data, "val" option')
parser.add_argument('--bbox_interval', type=int, default=-1, help='W&B: Set bounding-box image logging interval')
parser.add_argument('--artifact_alias', type=str, default='latest', help='W&B: Version of dataset artifact to use')
opt = parser.parse_known_args()[0] if known else parser.parse_args()
return opt

将权重路径、权重配置和数据集配置文件路径修改
parser.add_argument('--weights', type=str, default=ROOT / 'weights/yolov5s.pt', help='initial weights path')
parser.add_argument('--cfg', type=str, default=ROOT / 'models/yolov5s_watche.yaml', help='model.yaml path')
parser.add_argument('--data', type=str, default=ROOT / 'data/watche.yaml', help='dataset.yaml path')
还有需要改动的一般就是训练次数、批次大小和工作核心数了
parser.add_argument('--epochs', type=int, default=300)
parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs, -1 for autobatch')
parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
2.2. 执行训练
配置好后,直接执行
$ python train.py
期间可以用 tensorboard 查看参数
$ tensorboard --logdir=runs/train复制显示的网址地址,在浏览器打开查看训练过程

3. 检测效果
训练过程数据和模型存放在 runs\train\exp 文件夹中
一个为最优的权重文件 best.pt,一个为最后一轮训练的权重文件 last.pt
在训练过程中大小在50M左右,不过训完成后处理为14M左右
参考 《YOLOv5 使用入门》,利用验证集的图片数据、刚训练好的模型和数据集配置进行检测:
$ python detect.py --source=resources/VOC_DIY/images/val/7.jpg --weights=runs/train/exp/weights/best.pt --data=data/watche.yaml
效果还是可以的

cls:1, xywh:[0.7656546235084534, 0.6132478713989258, 0.14231498539447784, 0.06410256773233414], conf:0.77
cls:0, xywh:[0.4962049424648285, 0.5197649598121643, 0.7267552018165588, 0.6314102411270142], conf:0.78谢谢
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:1946次2023-09-08 15:20:45
-
浏览量:5995次2021-02-18 16:03:22
-
浏览量:2889次2024-03-06 16:15:59
-
浏览量:4179次2024-02-20 13:54:36
-
浏览量:4463次2024-02-02 18:15:06
-
浏览量:1241次2023-06-03 16:03:04
-
浏览量:5224次2022-10-31 15:07:27
-
浏览量:3670次2022-11-22 09:26:53
-
浏览量:4224次2022-11-22 09:58:36
-
浏览量:4446次2022-11-22 10:37:11
-
浏览量:928次2023-09-25 14:19:19
-
浏览量:2830次2024-02-23 17:41:04
-
浏览量:1827次2023-07-20 11:05:58
-
浏览量:4117次2023-12-16 11:15:45
-
2024-02-02 14:41:10
-
浏览量:2627次2023-12-19 16:06:28
-
浏览量:2685次2022-05-13 10:46:47
-
浏览量:8337次2024-02-02 17:13:35
-
浏览量:1593次2024-03-05 15:21:43



-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖

热爱秃头的每一天

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
