

一起来开发一个磁条机器人(三)

描述
上一篇文章对磁条机器人机械部分的内容进行了介绍
这一篇我们来讨论一下该机器人的下位机系统吧
系统概述
由于磁条机器人的功能较为简单,其下位机系统实际上是一系列电子元器件的组合。开局一张图。
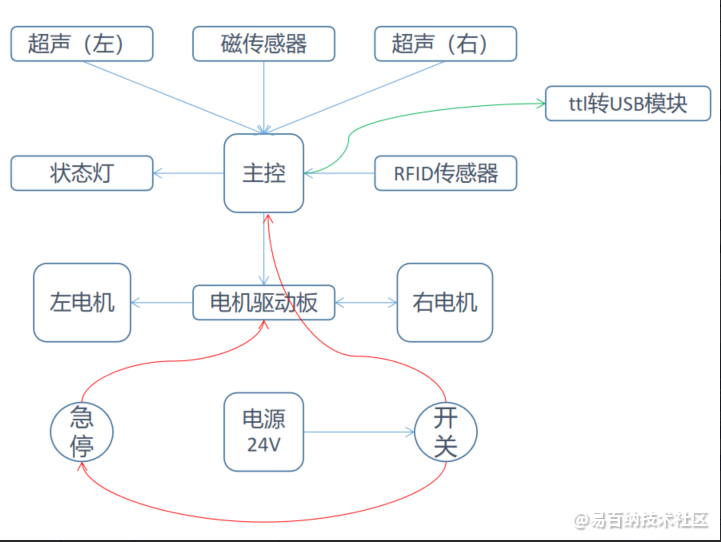
图中蓝色的线代表着传感器数据的流向,绿色的线代表的是上位机和下位机之间的命令通信,红色的线代表着供电。实际上图示已经很明显了,不过还是将关键流程说明一下。
主控:磁传感器向主控返回收到的磁条信号强弱,用以判断机器人与磁条的相对位置。RFID传感器向主控返回是否检测到了磁卡,卡片上的信息又是什么。左右超声负责向主控返回前方有无障碍物,障碍物的距离又是多少。主控根据收到的三者信号,通过自身算法判断机器人的环境信息,并通过上位机发布的指令,生成不同的电机控制信号,传送给电机驱动板。同时主控需要结合机器人的实际状态,改变灯的颜色
电源: 由于机器人是需要真实完成任务的,因此实际运行的机器人将不像往常电脑模拟一样,需要进行真实供电的。我们选用24V电源来为机器人供电。我们通过开关来控制电池与主控之间的通断,24V电源同时需要转换为5V电压,来为主控供电。急停按钮在开关按钮之后,用于控制电机驱动板的供电。
上面说了两个关键的部分:主控、电源。实际上,在我目前的认知中,机器人实际上就分为了三个部分,骨架、肉体、精神。我曾经在另外平台的一篇博客中发布过如何构建一个机器人团队。在我看来,机器人的组成部分和开发人员需求是高度一致的。机器人和我们人类一样,需要的概况来说就是以上三个部分。骨骼——机械结构——机械工程师,肉体——传感器及各个组件——硬件工程师,精神——算法——算法工程师。这一篇我们主要介绍的,就是肉体,也就是磁条机器人的传感器及各个组件构成的下位机系统。
下位机系统搭建
选型
1. 传感器
传感器中的磁传感器、RFID传感器在之前的两篇文章中介绍过了,这里不再赘述。那么就只剩下用于避障的超声传感器了。
超声传感器我选择的是一种防水式设计的,如下图。

这种传感器的好处顾名思义,当然也要比传统的几块钱那种小模块贵很多,同时装在工业性强一些的机器人上面也不会觉得low。
2. 元器件
电机我选择的是80转/min的行星齿轮减速电机,驱动板随便买,我买的是野火的L298N电机驱动板。
由于磁传感器的通信方式是232,因此我们还在机器人上面增加了一个ttl转232的模块。长这样。

为了接线方便,我还使用了232模块DB9免焊接头,长这样,对插到上面那个模块后,就可以直接做条线接到主控上了。实际上就是,传感器——DB9接头的管脚一边——另一边的232接头对插——ttl转232模块的232一端——ttl转232模块的ttl一端——主控。

机器人上面的一些线我是自己压的,还有一些使用的是2_7和2_5的牛角排针

布局
之前讲过机械结构的轮子布局,我们机器人的下位机系统的布局相类似。首先,电机的布局当然是要结合机械结构了啊,因为电机连接的就是主驱动轮。我们将电机放在了机器人后部大概1/3的位置,万向轮也布局在了机器人前方大概1/4的位置。
其次就是各个传感器的位置了。将磁传感器放在了机器人最前部,紧靠着机器人的正面,这样可以最快速的察觉到磁条位置的变化。值得说明的是,磁传感器距离主动轮越远,越有利于机器人调整位姿过弯。RFID传感器我们放在了机器人中心线右侧,需要注意该传感器的位置除了要躲开机器人中心线,因为中心线在运动过程中是磁条,还要躲开主动轮的位置,可能的话还要尽可能躲开万向轮得到位置,这样目标到位卡才不会和磁条或是目标卡重叠。
最后超声传感器一左一右,放在了机器人的正前方。ws2812灯带做了一个小设计,使得灯带环绕机器人一周,在前后左右四个位置都露出了一段灯带,用于未来显示机器人的状态。
接线
我们需要在传感器和主控、电源和主控、电源和按钮等之间完成接线。传感器的接线就不在这里提了,之前讲过很多了。这里唯独说一下急停和总开关,在整个电路上的接线。
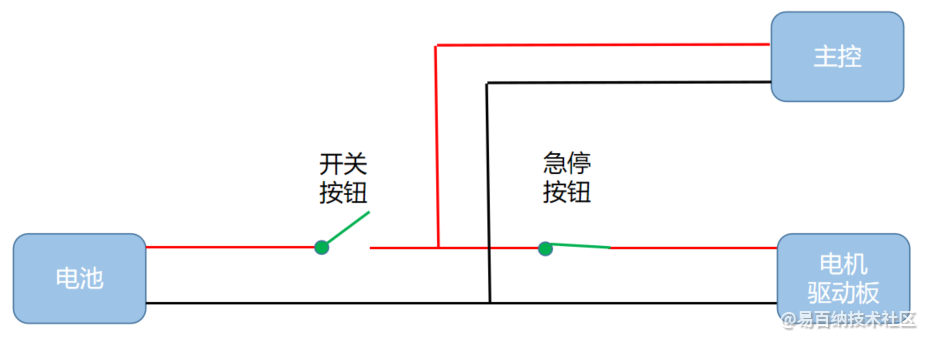
开关按钮选择,带自锁带灯的常开型,急停按钮选择常闭型。意思就是,开关平时是断开的,按下后可以自己锁住并发亮,开关闭合;急停平时是闭合的,按下后断开。
这样接线的话,按下开关按钮后,主控就会被上电,机器人可以正常接收命令。急停按钮选择常闭的,也就是在不按下是,开关是闭合的,急停按钮被拍下后,开关断开。这样的设计使得急停按钮被拍下后,电机驱动板失去上电,电机不能移动,达到急停的目的。
总结
这篇介绍了磁条机器人的下位机系统,选型布局及接线。下一篇文章要介绍代码了。
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:847次2023-04-20 08:54:12
-
浏览量:1408次2023-04-20 08:57:01
-
浏览量:898次2023-04-23 09:46:58
-
浏览量:882次2023-04-21 08:55:25
-
浏览量:1103次2023-04-23 09:44:59
-
2023-12-06 11:28:37
-
浏览量:1337次2023-03-20 15:51:34
-
浏览量:6758次2022-05-30 15:26:15
-
浏览量:1203次2023-08-10 14:45:17
-
浏览量:881次2023-09-20 11:37:44
-
浏览量:1064次2023-02-15 15:42:15
-
浏览量:1297次2023-10-28 16:11:07
-
浏览量:4220次2019-10-23 14:55:46
-
浏览量:526次2023-11-15 15:54:49
-
浏览量:685次2023-09-28 10:38:10
-
浏览量:1277次2023-12-11 11:01:31
-
浏览量:2243次2023-04-19 09:11:52
-
浏览量:1772次2020-04-03 09:38:23
-
浏览量:2343次2022-03-22 09:00:12






-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖

MOmo

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
