

一起来开发一个磁条机器人(二)

描述
上一篇文章对磁条机器人应该具有的功能进行了分析
这一篇我们按照上一篇总述的顺序,对磁导航机器人进行一个整体的设计。
我们按照三个方向:机械、嵌入式、算法,来进行分析。这一篇文章主要介绍机械部分的内容,剩下的留给以后的篇章。
机械设计
机械设计将是我介绍最简单的部分。对于这个机器人的机械设计,我本身是有以下几个基本需求的:
负载能力达到要求:我设计的机器人负载大概在50kg可以正常行走
外观:好外观就像贵皮肤一样,是要付费的,但我至少要选一个性价比高的皮肤
安装方便:涉及到机器人器材选型,小到螺丝的尺寸,大到外壳如何方便安装
一个昂贵的AMR机器人的结构设计,是要花费大量的时间进行修修改改的。好在我们设计的是一个磁条机器人。
机械设计——负载
1. 决定机器人负载能力的最重要的部分——电机
由于磁条机器人的行走特点是沿磁条轨道进行移动,因此不需要里程计、IMU这一类信息。因此我们选择的是直流减速电机。直流,通电就能转动,减速,通过电机内部的齿轮结构,实现不同的转速。
根据我的负载需求,我选择的电机属于行星齿轮减速电机,性能是80转/min。简单说一下,电机每分钟转数越低,它的转矩就会越大,转矩代表着这个电机究竟能带动多重的负载。选型也很简单,首先确定你要做的机器人产品的实际负载需求,根据这个负载需求你可以去淘宝或者其他的渠道,进行选型。向商家提供你需要的负载,电机的输入电压,商家会帮你进行选择的。如果想自己了解清楚,可以去学习一下电机的相关参数计算,我简单看过并没有深入研究,这里就不展开了。
我选的行星齿轮减速电机长这样。

2. 影响机器人负载能力的关键部分——车轮
显然,车轮是影响机器人负载的关键因素。一个不结实的车轮,电机再能带动大负载,车轮也会在重物的垂直压力下被破坏。唯一需要考虑的,就是车轮的类型。
相较于电机选型,车轮的选型更为简单。以我目前见到的、便宜一些的、定义为基础底盘的机器人来说,他们的移动方式基本上是双轮差速驱动。也就是说,该机器人是靠左右两个主动轮作为驱动力,两个主动轮产生不同速不同方向的转动,来实现机器人的移动。当然还有其他的移动模式,比如说依靠舵轮的移动。
既然选择了双轮差速驱动,同时我们设计的是一个较小的机器人,我们对于形状的选择是有限的:圆形、正方形和矩形(别和我说什么椭圆和五角星啊…)。针对不同形状的机器人,我们需要对主动轮和辅助轮的排列进行设计。我简单画了一张图,说明一下轮子的布局,也是我推荐的方式。
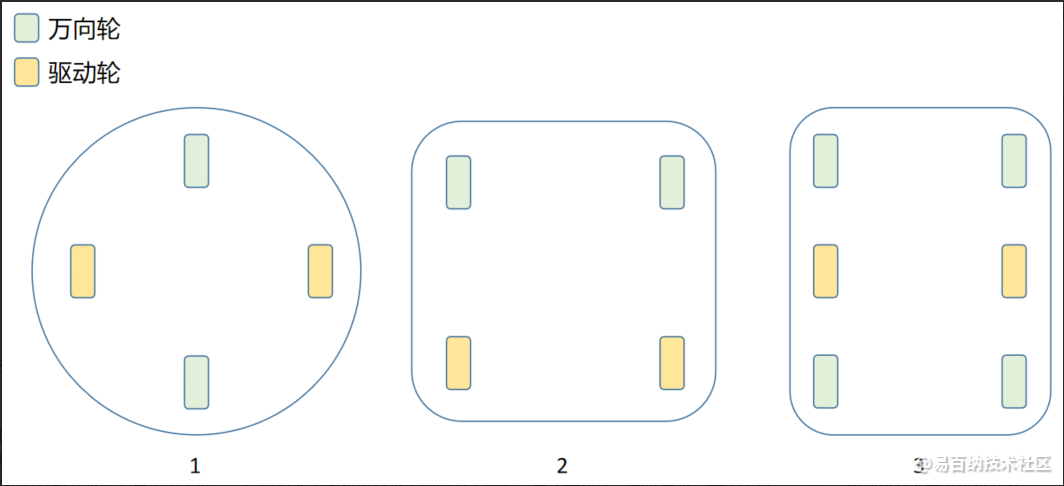
下面说一下各自的特点和事项
圆形:可以按照1号部署,同时也可以采用2号部署。采用1号部署时:一定要注意的是,万向轮需要设计一个悬挂,不然机器人即使面对非常薄的磁条时,依然会出现两个驱动轮不同时着地的情况(会非常糟糕,机器人不能掉头甚至不能过弯,教训非常深刻,因为我曾经设计的时候没有考虑到)。采用2号部署的话:由于是圆形的特点,机器人的驱动轮和万向轮又不能距离边缘太近,会造成机器人面对负载不平衡时发生侧翻。总之一句话,圆形真不是一个工业机器人的好选择(扫地机器人肯定更适合圆形)。
正方形:一般也就是2号部署了,我反正没想出来其他的方式。特点:这种布局的话,万向轮不用考虑悬挂。比较丑的是,这样的机器人做不到原地180调转姿态不变,因为它的旋转中心在两个驱动轮的中心。
矩形:可以使用2号部署,也可以使用3号部署。矩形是工业里AMR和AGV的绝大多数形状,拥有独一无二的优势,稳定、旋转中心在机器人中心、美观等。
下面我们要对万向轮和驱动轮进行选型了。这个比较简单,两点:结实耐磨和负载能力,再考虑一下价格就OK了。商家会对每种轮子的负载能力进行标识,比如同样四个轮子的负载能力是多少啊等等,我们可以根据这些参数进行选择。由于我们设计的还是一个比较简单便宜的磁条机器人,因此无论是驱动轮还是万向轮,可以不用设计带悬挂的结构,有过坎需求的话另当别论了。
下面是我选择的轮子,发在这看一下,我特别考虑的一点就是静音

3. 承载机器人负载能力的主体部分——机器人核心结构
显而易见的,机器人需要骨架、上壳、下壳和内部一系列为了保证机器人顺利运行的结构。我们需要一个机械工程师对此进行一番好好的设计。
需要设计的部分有很多
基础内容包括:
万向轮和从动轮具体在哪个位置安装,以什么样的方式安装是更结实的;传感器的安装位置在哪里,安装在什么位置会更好,例如磁传感器需要安装在机器人最前方的最中间;机器人的开关安装在哪里,急停按钮安装在哪里,机器人充电孔又安装在哪里;超声传感器安装在哪里避障效果更好;碰撞开关以什么样的方式为机器人做最后的护航。
进阶内容包括:
机器人整体采用几号螺钉和螺纹;机器人材质的选择,厚度又是多少;机器人的状态灯安装在什么位置;机器人内部各个模块的布局怎么样最合理,内部的走线怎么样不会乱;内部各模块的固定方式又是什么。
高阶及额外内容包括:
每一个模块是否安装方便,机器人是否经过你的设计能够最快生产出来;机器人的外观怎么样设计是更加好看的。
以上仅仅是抛出问题,而在实际的机器人结构设计过程中,这些问题将一一摆在开发者的面前。好在,我们有非常出色的机械工程师,并且我知道我的产品应该变成何种模样。机器人在思维的碰撞后,得到了实现。但是很遗憾,因为一些原因我不能将机器人的样子展现出来。但作为结果我可以说,它的样子值得了它的价值,我个人还是比较满意的,尽管它仍然需要很大程度的进一步迭代。还是放一个初期的稿图吧,很简单的示意。
总结
这一篇文章主要介绍了磁条机器人有关机械结构的一些知识及总结,下面两篇文章将依次介绍嵌入式及算法。
写的不容易,欢迎各位朋友点赞并加关注,谢谢!
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:1093次2023-04-20 08:54:12
-
浏览量:1363次2023-04-21 08:46:56
-
浏览量:1158次2023-04-23 09:46:58
-
浏览量:1367次2023-04-23 09:44:59
-
浏览量:1125次2023-04-21 08:55:25
-
2023-12-06 11:28:37
-
浏览量:1566次2023-03-20 15:51:34
-
浏览量:7209次2022-05-30 15:26:15
-
浏览量:1500次2023-08-10 14:45:17
-
浏览量:1298次2023-02-15 15:42:15
-
浏览量:1230次2023-09-20 11:37:44
-
浏览量:794次2023-11-15 15:54:49
-
浏览量:971次2023-09-28 10:38:10
-
浏览量:4590次2019-10-23 14:55:46
-
浏览量:1523次2023-10-28 16:11:07
-
浏览量:2627次2022-03-22 09:00:12
-
浏览量:2583次2023-04-19 09:11:52
-
浏览量:2004次2020-04-03 09:38:23
-
浏览量:2188次2023-12-11 11:01:31






-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖

MOmo

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
