

技术专栏
关于我随便敲了几行代码就验证了算法的那些事

引言
可能大家觉得这个题目有些奇怪,不过确实奇怪,哈哈哈。随便敲几行代码这个茶里茶气的说法是从我朋友那里得到的,觉得好玩,就起了一个这样的标题。
但是总归不能喧宾夺主,今天博客要讲的,是我之前会议论文中提到的一个关于“机器人姿态规划”方面的想法。
基于欧拉角---角速度的轨迹规划
这个算法的背景是:
当我们已知当前姿态,用R1表示,以及期望姿态,用R2表示。当然这里指的是机器人末端的姿态,那么我们想从R1变到R2,都需要怎么做呢?
按照一般的做法,是需要使用轨迹规划的算法,计算出中间点的姿态,然后控制机械臂完成这些中间点。
但是我就是想反其道而行之,那么我们换一种思路。
首先得到两个旋转之间的旋转变换矩阵,暂且用RP表示;
然后将其转换成欧拉角;
针对每个角度,写出当前时间步的角速度矢量,如[0,0,0.02],即意味着这是以欧拉角中绕z轴旋转的分量得到的角速度矢量。对了,这个角速度矢量是怎么得到的呢?其实很简单啦,就是随便设置个阻尼系数,用z轴的欧拉角角度值,除以系数就可以;
下一步很重要,就是需要将旋转角速度通过正运动学的旋转部分,转换到机器人基坐标系下!!!因为我们速度控制是需要使用雅可比矩阵的,而雅可比矩阵进行速度控制时,给到的实际上是相对及基坐标系的速度。
最后就是每个周期中分三次控制角速度。
实验验证
我们随便写几行代码,框住的地方是主要核心思路。

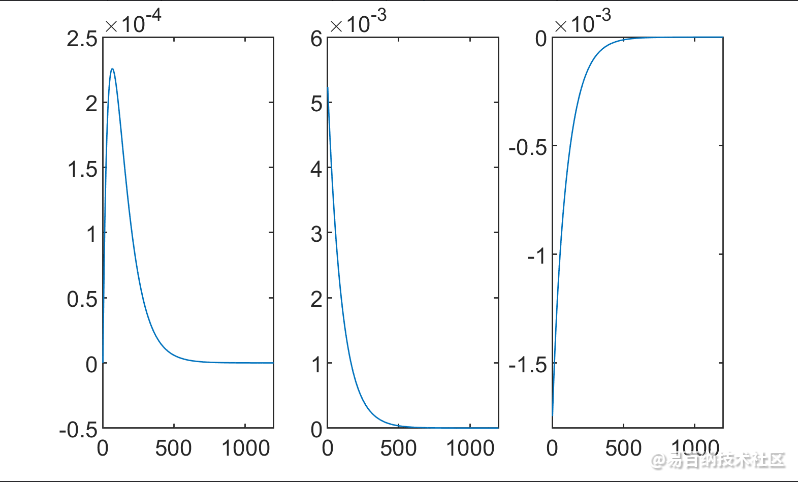
第一个矩阵是目标姿态,第二个是初始姿态,第三个是最终调整后的姿态。


对应速度曲线
May the force be with you!
声明:本文内容由易百纳平台入驻作者撰写,文章观点仅代表作者本人,不代表易百纳立场。如有内容侵权或者其他问题,请联系本站进行删除。
红包
点赞
收藏
评论
打赏
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
评论
0个
手气红包
 暂无数据
暂无数据相关专栏
-
浏览量:2000次2022-03-15 09:00:14
-
浏览量:1835次2020-02-21 10:37:18
-
浏览量:2128次2022-01-26 09:00:17
-
浏览量:1296次2023-04-14 11:33:22
-
浏览量:1717次2020-06-18 11:07:49
-
浏览量:2711次2020-12-31 09:42:35
-
浏览量:2353次2019-12-16 15:29:01
-
浏览量:2016次2020-06-23 12:49:33
-
浏览量:9626次2020-12-11 10:03:28
-
浏览量:1132次2023-02-13 11:48:11
-
浏览量:2919次2018-01-09 23:21:40
-
浏览量:1864次2018-11-06 21:25:05
-
浏览量:1218次2022-05-28 10:31:03
-
浏览量:2793次2022-01-28 09:00:16
-
浏览量:1051次2023-01-31 09:17:20
-
浏览量:4589次2021-06-20 20:10:03
-
浏览量:1360次2023-04-11 15:24:20
-
浏览量:2415次2017-11-06 18:32:33
-
浏览量:2281次2020-08-13 14:03:20
关于作者

四叶草~
元宇宙(Metaverse)
原创132
阅读46.6w
收藏27
点赞13
评论24













切换马甲
上一页
下一页
TA最新文章
打赏用户
共 0 位
我要创作
分享技术经验,可获取创作收益
置顶时间设置
结束时间
删除原因
-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
打赏作者
四叶草~
您的支持将鼓励我继续创作!
打赏金额:
¥1
¥5
¥10
¥50
¥100
支付方式:
 微信支付
微信支付
举报反馈
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
发布时间设置
发布时间:
请选择发布时间设置
是否关联周任务-专栏模块
审核失败
失败原因
请选择失败原因
备注
请输入备注



关注公众号
联系我们
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
回顶部
