

【图像与点云融合教程(一)】Ubuntu20下配置海康相机和LIVOX AVIA雷达

1. 软硬件环境
雷达:LIVOX AVIA
相机:海康威视 MV-CA023-10UC
Ubuntu 20.04 x64
2. 相机驱动配置
2.1 下载安装 MVS 客户端
下载链接:海康机器人-机器视觉-下载中心 (hikrobotics.com)
选择下图的MVS客户端下载:

解压后通过 deb 或 tar.gz 中的 setup.sh 进行安装均可,最终会安装在 /opt/MVS/ 路径下:

在 /etc/ld.so.conf.d 文件中新建文件 mvs.conf,内容如下:
/opt/vc/lib
/opt/MVS/lib/64
新建终端,执行:
sudo ldconfig重启电脑使环境配置生效,否则无法读取到相机。
2.2 测试
2.2.1 Python 脚本测试
代码见附录1
效果如下(忘截图了,拿之前在Ubuntu16上拍的凑一下):
2.2.2 ROS 脚本测试
ROS1 环境配置使用一键安装脚本:
wget http://fishros.com/install -O fishros && . fishros
# 然后跟着命令行提示安装即可下载链接:luckyluckydadada/HIKROBOT-MVS-CAMERA-ROS: The ros driver package of Hikvision Industrial Camera SDK. (github.com)
# 创建工作空间目录
mkdir -p ~/ws_hikrobot_camera/src
# 克隆代码
git clone https://github.com/luckyluckydadada/HIKROBOT-MVS-CAMERA-ROS.git ~/ws_hikrobot_camera/src/hikrobot_camera
cd ~/ws_hikrobot_camera
# 编译
catkin_make使用 rviz 查看图像:
source ./devel/setup.bash
roslaunch hikrobot_camera hikrobot_camera_rviz.launch效果如下:

3. 雷达SDK和驱动配置
3.1 SDK 的下载、安装与测试
下载链接:Release Livox-SDK 2.3.0 · Livox-SDK/Livox-SDK (github.com)
编译安装SDK:
sudo apt install cmake
# 下载安装包后解压
cd Livox-SDK
cd build && cmake ..
make
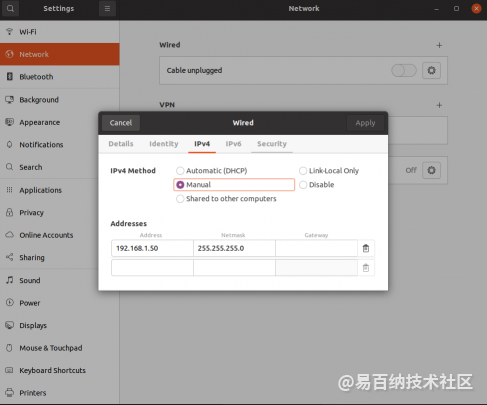
sudo make install修改电脑的静态ip(ip设置为多少在雷达说明书中有写,型号相同的同学可以直接抄我的):
执行测试:```cpp
cd build/sample/lidar/
./lidar_sample # 接着终端会不断输出信息
3.2 雷达 ROS 驱动配置
克隆代码(这一句将代码克隆到指定目录,这个目录是克隆时自动创建的,与我们平时创建ROS工作空间的操作有些不同,第一次看到这个可能会对该路径感到迷惑):
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src编译工作空间:
cd ws_livox
catkin_make启动雷达节点测试(这一长串码可以在激光雷达机身外壳二维码下方读到,抄上去即可):
source ./devel/setup.sh
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"在 rviz 中显示效果如下:

附录1
import sys
from ctypes import *
import os
import numpy as np
import time
#from Camera import Camera
#from FTPService import FTPService
#from GPIO_set import GPIO_set
import cv2
#import configparser
sys.path.append("/opt/MVS/Samples/64/Python/MvImport") #打开MVS中的MvImport文件,对于不同系统打开的文件路径跟随实际文件路径变化即可
from MvCameraControl_class import * #调用了MvCameraControl_class.py文件
class HKCamera():
def __init__(self, CameraIdx=0, log_path=None):
# enumerate all the camera devices
deviceList = self.enum_devices()
# generate a camera instance
self.camera = self.open_camera(deviceList, CameraIdx, log_path)
self.start_camera()
def __del__(self):
if self.camera is None:
return
# 停止取流
ret = self.camera.MV_CC_StopGrabbing()
if ret != 0:
raise Exception("stop grabbing fail! ret[0x%x]" % ret)
# 关闭设备
ret = self.camera.MV_CC_CloseDevice()
if ret != 0:
raise Exception("close deivce fail! ret[0x%x]" % ret)
# 销毁句柄
ret = self.camera.MV_CC_DestroyHandle()
if ret != 0:
raise Exception("destroy handle fail! ret[0x%x]" % ret)
@staticmethod
def enum_devices(device=0, device_way=False):
"""
device = 0 枚举网口、USB口、未知设备、cameralink 设备
device = 1 枚举GenTL设备
"""
if device_way == False:
if device == 0:
cameraType = MV_GIGE_DEVICE | MV_USB_DEVICE | MV_UNKNOW_DEVICE | MV_1394_DEVICE | MV_CAMERALINK_DEVICE
deviceList = MV_CC_DEVICE_INFO_LIST()
# 枚举设备
ret = MvCamera.MV_CC_EnumDevices(cameraType, deviceList)
if ret != 0:
raise Exception("enum devices fail! ret[0x%x]" % ret)
return deviceList
else:
pass
elif device_way == True:
pass
def open_camera(self, deviceList, CameraIdx, log_path):
# generate a camera instance
camera = MvCamera()
# 选择设备并创建句柄
stDeviceList = cast(deviceList.pDeviceInfo[CameraIdx], POINTER(MV_CC_DEVICE_INFO)).contents
if log_path is not None:
ret = self.camera.MV_CC_SetSDKLogPath(log_path)
if ret != 0:
raise Exception("set Log path fail! ret[0x%x]" % ret)
# 创建句柄,生成日志
ret = camera.MV_CC_CreateHandle(stDeviceList)
if ret != 0:
raise Exception("create handle fail! ret[0x%x]" % ret)
else:
# 创建句柄,不生成日志
ret = camera.MV_CC_CreateHandleWithoutLog(stDeviceList)
if ret != 0:
raise Exception("create handle fail! ret[0x%x]" % ret)
# 打开相机
ret = camera.MV_CC_OpenDevice(MV_ACCESS_Exclusive, 0)
if ret != 0:
raise Exception("open device fail! ret[0x%x]" % ret)
return camera
def start_camera(self):
stParam = MVCC_INTVALUE()
memset(byref(stParam), 0, sizeof(MVCC_INTVALUE))
ret = self.camera.MV_CC_GetIntValue("PayloadSize", stParam)
if ret != 0:
raise Exception("get payload size fail! ret[0x%x]" % ret)
self.nDataSize = stParam.nCurValue
self.pData = (c_ubyte * self.nDataSize)()
self.stFrameInfo = MV_FRAME_OUT_INFO_EX()
memset(byref(self.stFrameInfo), 0, sizeof(self.stFrameInfo))
self.camera.MV_CC_StartGrabbing()
def get_Value(self, param_type, node_name):
"""
:param cam: 相机实例
:param_type: 获取节点值得类型
:param node_name: 节点名 可选 int 、float 、enum 、bool 、string 型节点
:return: 节点值
"""
if param_type == "int_value":
stParam = MVCC_INTVALUE_EX()
memset(byref(stParam), 0, sizeof(MVCC_INTVALUE_EX))
ret = self.camera.MV_CC_GetIntValueEx(node_name, stParam)
if ret != 0:
raise Exception("获取 int 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stParam.nCurValue
elif param_type == "float_value":
stFloatValue = MVCC_FLOATVALUE()
memset(byref(stFloatValue), 0, sizeof(MVCC_FLOATVALUE))
ret = self.camera.MV_CC_GetFloatValue(node_name, stFloatValue)
if ret != 0:
raise Exception("获取 float 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stFloatValue.fCurValue
elif param_type == "enum_value":
stEnumValue = MVCC_ENUMVALUE()
memset(byref(stEnumValue), 0, sizeof(MVCC_ENUMVALUE))
ret = self.camera.MV_CC_GetEnumValue(node_name, stEnumValue)
if ret != 0:
raise Exception("获取 enum 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stEnumValue.nCurValue
elif param_type == "bool_value":
stBool = c_bool(False)
ret = self.camera.MV_CC_GetBoolValue(node_name, stBool)
if ret != 0:
raise Exception("获取 bool 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stBool.value
elif param_type == "string_value":
stStringValue = MVCC_STRINGVALUE()
memset(byref(stStringValue), 0, sizeof(MVCC_STRINGVALUE))
ret = self.camera.MV_CC_GetStringValue(node_name, stStringValue)
if ret != 0:
raise Exception("获取 string 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stStringValue.chCurValue
else:
return None
def set_Value(self, param_type, node_name, node_value):
"""
:param cam: 相机实例
:param param_type: 需要设置的节点值得类型
int:
float:
enum: 参考于客户端中该选项的 Enum Entry Value 值即可
bool: 对应 0 为关,1 为开
string: 输入值为数字或者英文字符,不能为汉字
:param node_name: 需要设置的节点名
:param node_value: 设置给节点的值
:return:
"""
if param_type == "int_value":
ret = self.camera.MV_CC_SetIntValueEx(node_name, int(node_value))
if ret != 0:
raise Exception("设置 int 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
elif param_type == "float_value":
ret = self.camera.MV_CC_SetFloatValue(node_name, float(node_value))
if ret != 0:
raise Exception("设置 float 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
elif param_type == "enum_value":
ret = self.camera.MV_CC_SetEnumValue(node_name, node_value)
if ret != 0:
raise Exception("设置 enum 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
elif param_type == "bool_value":
ret = self.camera.MV_CC_SetBoolValue(node_name, node_value)
if ret != 0:
raise Exception("设置 bool 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
elif param_type == "string_value":
ret = self.camera.MV_CC_SetStringValue(node_name, str(node_value))
if ret != 0:
raise Exception("设置 string 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
def set_exposure_time(self, exp_time):
self.set_Value(param_type="float_value", node_name="ExposureTime", node_value=exp_time)
def get_exposure_time(self):
return self.get_Value(param_type="float_value", node_name="ExposureTime")
def get_image(self, width=None):
"""
:param cam: 相机实例
:active_way:主动取流方式的不同方法 分别是(getImagebuffer)(getoneframetimeout)
:return:
"""
ret = self.camera.MV_CC_GetOneFrameTimeout(self.pData, self.nDataSize, self.stFrameInfo, 1000)
if ret == 0:
image = np.asarray(self.pData).reshape((self.stFrameInfo.nHeight, self.stFrameInfo.nWidth, 3))
if width is not None:
image = cv2.resize(image, (width, int(self.stFrameInfo.nHeight * width / self.stFrameInfo.nWidth)))
pass
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
return image
else:
return None
def show_runtime_info(self, image):
exp_time = self.get_exposure_time()
cv2.putText(image, ("exposure time = %1.1fms" % (exp_time * 0.001)), (20, 50), cv2.FONT_HERSHEY_SIMPLEX, 0.5, 255, 1)
if __name__ == '__main__':
camera = HKCamera()
try:
while True:
image = camera.get_image(width=800)
if image is not None:
camera.show_runtime_info(image)
cv2.imshow("", image)
key = cv2.waitKey(50) & 0xFF
if key == ord('e') or key == ord('E'):
cv2.destroyAllWindows()
break
except Exception as e:
print(e)- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:2192次2023-10-26 17:37:43
-
浏览量:955次2024-01-03 09:56:52
-
浏览量:29212次2021-02-05 17:49:30
-
浏览量:7285次2021-04-08 11:11:30
-
浏览量:5327次2021-07-26 17:37:55
-
浏览量:3879次2019-11-13 09:07:39
-
浏览量:3260次2020-05-08 10:44:24
-
浏览量:2813次2020-01-08 11:20:32
-
浏览量:8176次2017-12-31 12:16:11
-
浏览量:3143次2022-05-25 14:02:47
-
浏览量:3445次2020-07-31 16:50:14
-
浏览量:878次2025-07-15 09:48:44
-
浏览量:1595次2023-06-02 17:41:25
-
浏览量:24250次2024-06-28 17:19:56
-
浏览量:2066次2020-03-26 10:23:37
-
浏览量:2175次2018-12-01 13:47:09
-
浏览量:115次2025-11-18 09:35:24
-
2023-07-05 10:13:58
-
浏览量:740次2023-04-11 10:29:43

四叶草~
元宇宙(Metaverse)













-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
四叶草~

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
