

Webots小车与Gampping建图仿真与ORB3算法实践

前言:
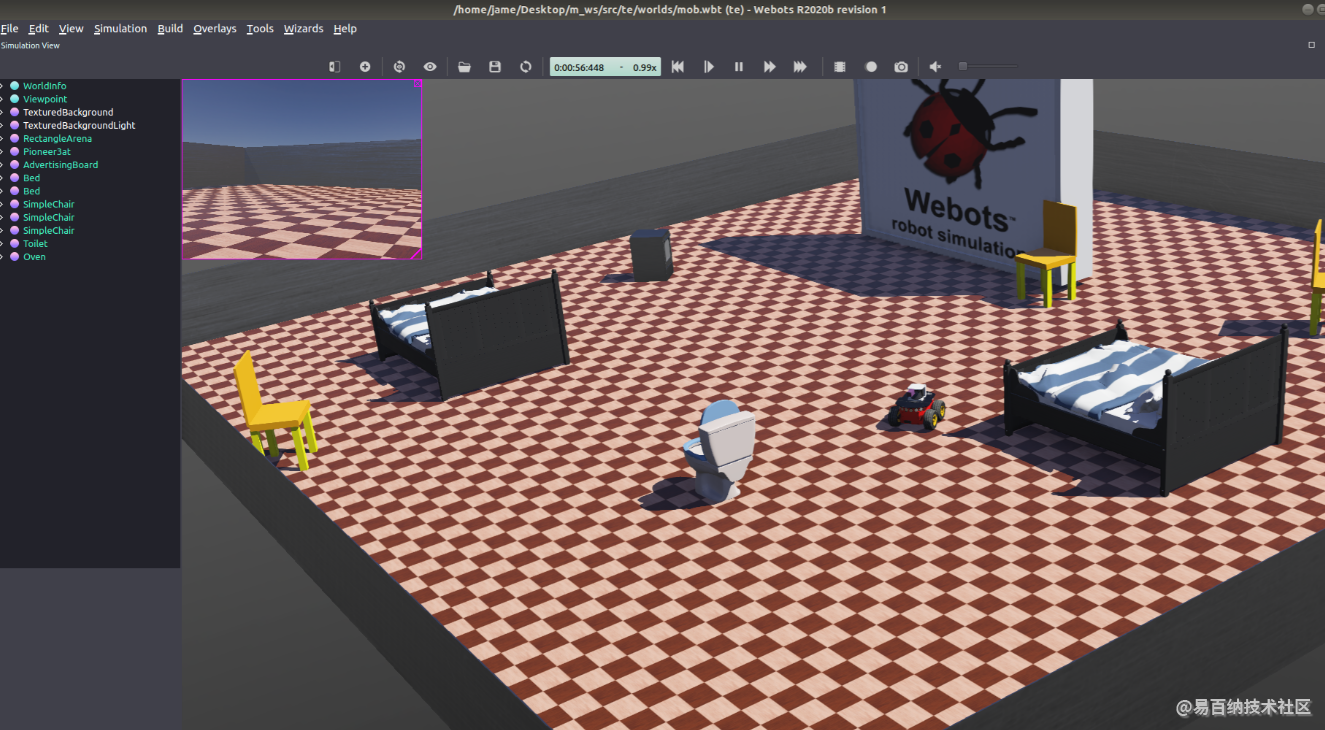
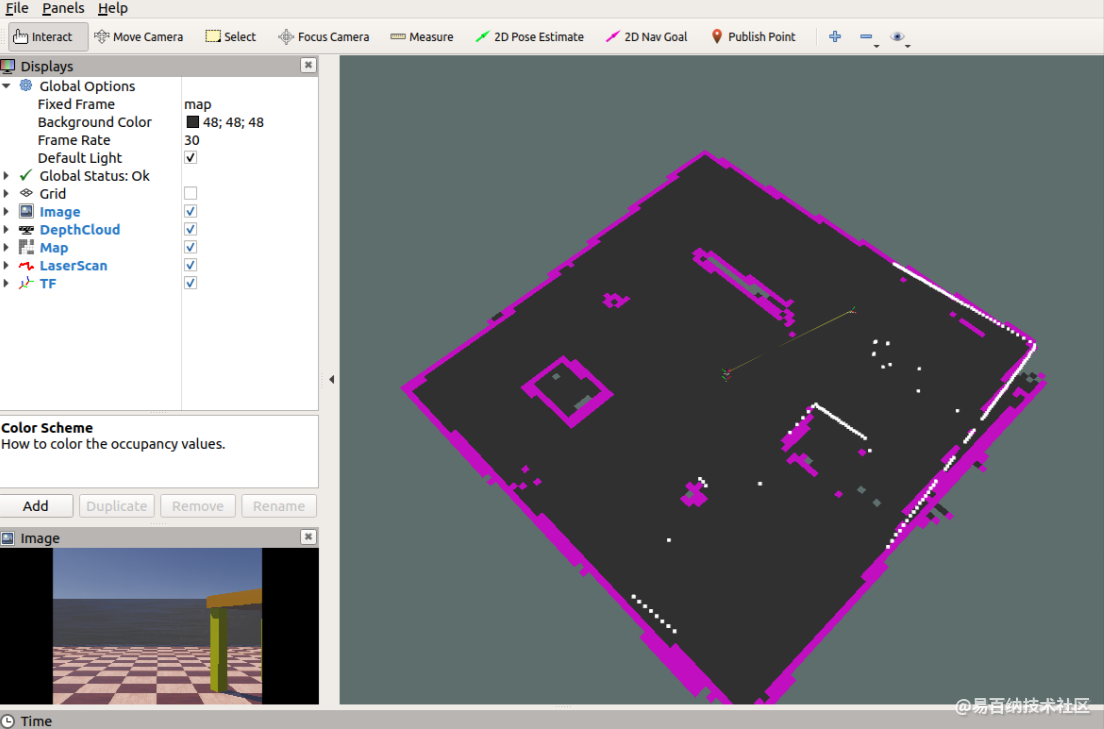
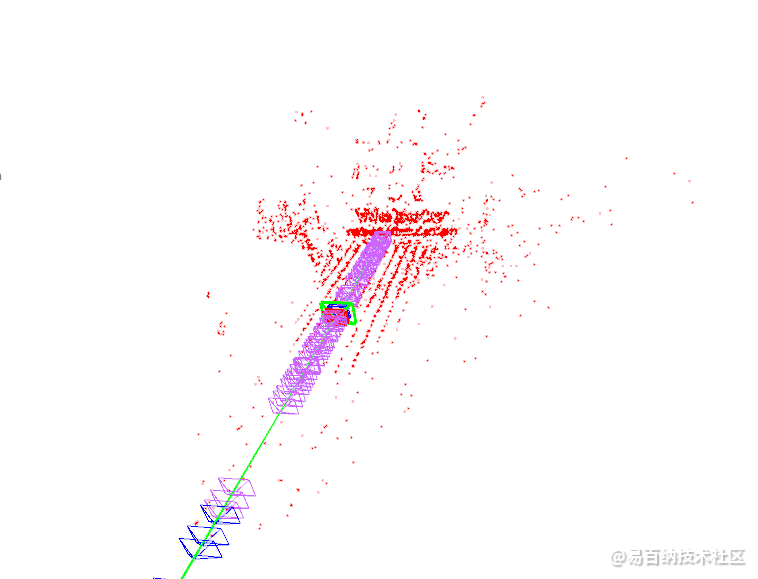
在研一的时候,由于XXX项目的需要,其中一项就是需要测试Gmapping建图,自然也要求使用ROS系统。由于之前经常在webots中进行仿真,所以想先在仿真中完成代码,再迁移实体。还有的是项目需要使用的ORB-SLAM3,便又测试了单目里程估计。这部分代码已经上传到我的Github上供大家参考(研究生小白菜福利)。这里就不贴代码了,文中会说文件和函数。先上一波图,说明是可以的。
Gmapping
gmapping是基于RBpf粒子滤波的,定位和建图分离,是先定位后建图的思想。机器人不断运动运动,不断观测,降低自己位置的不确定度,最后精确定位。如果只是想使用,通过ROS可以很方便调用这部分算法。对于具体的不同环境可以调节参数来获得良好效果。参数可以在gampping的node下面进行修改,每个不同的属性可以在ROS wiki gmapping网站上查询。在我的代码中,节点描述和启动在mob.launch文件中实现。
ORB3
ORB-SLAM3是开源视觉SLAM库,建的稀疏图,emmmmm我也不是专门研究这个视觉定位建图方向的,了解浅薄,没啥太多实践,所以这里就不在BB了:)。在我的这个项目里用来做里程估计,给的代码是没有给webots中的相机进行标定内参的,就是随便给的,主要的文件就是orb3_odom.cpp,主要功能函数就是GrabImage。启动这部分功能,运行orb3.launch就可以了。另外要很准确的在webots标定相机,没有试过,这个还得靠大家一起探索,如果有好的方法可以留言。webots的相机都是理想的(没有畸变),查查官网,估计也不是难事。再不行也可以通过一些手段反向得到相机内参,也不是不可以。
在我的工程中,主要就是矫正了坐标系,测试了下效果(里程的单位不是准确的),感觉还行。突出的贡献,主要是如何和webots结合在一起仿真使用吧。题外话:webots搭建世界环境是很方便的,做视觉SLAM的可以在这个虚拟环境中先进行测试,然后在部署到硬件上,感觉开发会快不少。

webots和ROS
Webots平台可以说是足够简单容易上手的,基于ODE物理引擎。凡事有个但是。但是当大家想把webots和ROS一起用的时候似乎就不是那么流行。很多做ROS物理仿真的人都是在GAZEBO中实现的,但是总是有人想要用webots和ROS。总的来说,webots支持ROS还不错,在ubuntu下面只要装额外的包即可webots_ros。按照官网说的,装好环境后
对于传感器初始化,我写成了一个函数,在mob.hpp下的 Order_Init_Sensor。通过ServiceClient的形式配置传感器的time_step和使能。然后,通过 rostopic list 你就会发现传感器话题。电机貌似直接给指令,不用使能。使能的传感器会以time_step的间隔发送topic,订阅后,只要在callback函数里面处理数据就可以了。另外,给电机指令的函数我封装成 mob.hpp下 Order_Float。 工程中的传感器没多少,如果要用其他的传感器,举一反三,照着来就会了。
总的来说特别方便。就是代码的内容相比没有ROS的时候多了点,这个自己封装下就好。
还有就是webots的启动可以通过webots.launch运行脚本webots_launcher.py启动,里面的参数配置仔细看下就好。
其他
上面的内容都弄好了,ROS的topic接口衔接以下就好。对于ROS默认坐标系和Webots不同的问题,我的解决办法是自己在callback函数里面进行矫正。在这个工程里,我没有控制小车pioneer3,而是直接给了个速度,向前进,但足以说明工程已经走通。工程里面,可能会多一些之前没咋见过的东西,这些都是Webots提供的一些.msg(消息格式)啊,或者.srv(ROS Service)文件,不要太在意。
还有就是这个代码需要修改launch文件中的一些路径,不是简单下载编译就好了。
工程在编译好后,先运行mob.launch(gmapping),再运行orb3.launch (orb3)。
最后,如果有啥问题,可以留言,古德拉克。
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:1364次2023-03-15 09:05:04
-
浏览量:18544次2021-06-15 00:09:06
-
浏览量:11547次2021-06-25 16:41:43
-
浏览量:5330次2021-02-04 16:47:25
-
浏览量:3365次2023-11-14 13:37:34
-
浏览量:4860次2021-05-18 15:15:50
-
浏览量:45647次2020-12-12 19:46:11
-
浏览量:4851次2020-12-04 10:33:46
-
浏览量:4411次2021-08-05 14:39:56
-
浏览量:1734次2023-04-17 15:56:29
-
浏览量:4171次2019-12-23 11:03:59
-
浏览量:1292次2023-05-13 21:35:31
-
浏览量:13971次2020-11-28 15:56:56
-
浏览量:40591次2021-06-28 08:13:24
-
浏览量:5670次2021-01-14 16:44:46
-
浏览量:2031次2021-01-15 17:16:48
-
浏览量:8814次2020-12-20 14:19:53
-
浏览量:1878次2023-04-14 14:37:29
-
浏览量:5352次2020-08-29 19:35:34


-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖

虽万人吾往矣

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
