

xavier nx平台调试spi从模式1
1. 前言
想运行spi测试通过连接的spi1和spi3的jetson xavier nx板。
在连接spi1-spi3之前,我连接了spi1的MOSI-MISO (spi3的MOSI-MISO),
并使用spidev_test.c示例进行了测试,以确认tx rx在spi1和spi3上都可以正常工作。
刚开始调试时有以下几个问题
(1)连接spi1和spi3时,如何设置主模式和从模式?
是否更新pinmux吗?
(2)下面两种方法之间的spi1-spi3如何连接?
a. spi1 MISO <-> spi3 MISO / spi1 MOSI <-> spi3 MOSI / spi1 SCK<-> spi3 SCK / spi1 CS0 <-> spi CS0
b. spi1 MISO <-> spi3 MOSI / spi1 MOSI <-> spi3 MISO / spi1 SCK<-> spi3 SCK / spi1 CS0 <-> spi CS0(3)如何做rx在spi 从模式?
当数据进入时是否出现中断?
查看spi示例(spidev_test.c), ioctl(fd, SPI_IOC_MESSAGE(1), &tr)用于检查tx和rx。
这是检查rx的唯一方法吗?
2. 参考方法
(1)配置如下
将tegra124-spi-slave添加到设备树中。
使用两个xavier,一个用于master,另一个用于slave
这是master dts
spi0: spi@3210000 {
compatible = “nvidia,tegra186-spi”;
reg = <0x0 0x03210000 0x0 0x10000>;
interrupts = <0 36 0x04>;
#address-cells = <1>;
#size-cells = <0>;
iommus = <&smmu TEGRA_SID_GPCDMA_0>;
dma-coherent;
dmas = <&gpcdma 15>, <&gpcdma 15>;
dma-names = “rx”, “tx”;
nvidia,dma-request-selector = <&gpcdma 15>;
spi-max-frequency = <65000000>;
nvidia,clk-parents = “pll_p”, “clk_m”;
clocks = <&bpmp_clks TEGRA194_CLK_SPI1>,
<&bpmp_clks TEGRA194_CLK_PLLP_OUT0>,
<&bpmp_clks TEGRA194_CLK_CLK_M>;
clock-names = “spi”, “pll_p”, “clk_m”;
resets = <&bpmp_resets TEGRA194_RESET_SPI1>;
reset-names = “spi”;
status = “okay”;
nvidia,clock-always-on;
spi@0 {
compatible = “spidev”;
reg = <0>;
spi-max-frequency = <65000000>;
status = “okay”;
};
};
这是slave dts
spi0: spi@3210000 {
compatible = “nvidia,tegra124-spi-slave”;
reg = <0x0 0x03210000 0x0 0x10000>;
interrupts = <0 36 0x04>;
#address-cells = <1>;
#size-cells = <0>;
iommus = <&smmu TEGRA_SID_GPCDMA_0>;
dma-coherent;
dmas = <&gpcdma 15>, <&gpcdma 15>;
dma-names = “rx”, “tx”;
nvidia,dma-request-selector = <&gpcdma 15>;
spi-max-frequency = <65000000>;
nvidia,clk-parents = “pll_p”, “clk_m”;
clocks = <&bpmp_clks TEGRA194_CLK_SPI1>,
<&bpmp_clks TEGRA194_CLK_PLLP_OUT0>,
<&bpmp_clks TEGRA194_CLK_CLK_M>;
clock-names = “spi”, “pll_p”, “clk_m”;
resets = <&bpmp_resets TEGRA194_RESET_SPI1>;
reset-names = “spi”;
status = “okay”;
nvidia,clock-always-on;
spi@0 {
compatible = “spidev”;
reg = <0>;
spi-max-frequency = <65000000>;
nvidia,slave-ready-gpio=<&tegra_main_gpio TEGRA194_MAIN_GPIO(T, 3) 0>;
nvidia,enable-hw-based-cs;
status = “okay”;
};
};(2)测试方法
打开SSH终端,首先用下面的命令启动spi从属
./spidev_test -D /dev/spidev0.0 -s 150000 -n100 -g30 -p4 -z在另一个终端中,使用以下命令启动spi master
./spidev_test -D /dev/spidev3.1 -s 150000 -n100 -g30 -p4 -z3. 调试记录
继续以下方式修改dts。
(1)执行/opt/nvidia/jetson-io/jetson-io.py命令,激活spi1、spi3
(2)
sudo dtc -I dts -O dtb -o ~/user-custom.dts /boot/tegra194-p3668-all-p3509-0000-user-custom.dtb(3)修改user-custom.dts
spi@3210000 {
compatible = “nvidia,tegra186-spi”;
reg = <0x0 0x3210000 0x0 0x10000>;
interrupts = <0x0 0x24 0x4>;
#address-cells = <0x1>;
#size-cells = <0x0>;
iommus = <0x2 0x20>;
dma-coherent;
dmas = <0x19 0xf 0x19 0xf>;
dma-names = “rx”, “tx”;
spi-max-frequency = <0x3dfd240>;
nvidia,clk-parents = “pll_p”, “clk_m”;
clocks = <0x4 0x87 0x4 0x66 0x4 0xe>;
clock-names = “spi”, “pll_p”, “clk_m”;
resets = <0x5 0x5b>;
reset-names = “spi”;
status = “okay”;
linux,phandle = <0xf2>;
phandle = <0xf2>;
spi@0 {
compatible = “spidev”;
reg = <0x0>;
spi-max-frequency = <0x2faf080>;
controller-data {
nvidia,enable-hw-based-cs;
nvidia,rx-clk-tap-delay = <0x10>;
nvidia,tx-clk-tap-delay = <0x0>;
};
};
spi@1 {
compatible = “spidev”;
reg = <0x1>;
spi-max-frequency = <0x2faf080>;
controller-data {
nvidia,enable-hw-based-cs;
nvidia,rx-clk-tap-delay = <0x10>;
nvidia,tx-clk-tap-delay = <0x0>;
};
};
};
spi@3230000 {
compatible = “nvidia,tegra186-spi-slave”;
reg = <0x0 0x3230000 0x0 0x10000>;
interrupts = <0x0 0x26 0x4>;
#address-cells = <0x1>;
#size-cells = <0x0>;
iommus = <0x2 0x20>;
dma-coherent;
dmas = <0x19 0x11 0x19 0x11>;
dma-names = “rx”, “tx”;
spi-max-frequency = <0x3dfd240>;
nvidia,clk-parents = “pll_p”, “clk_m”;
clocks = <0x4 0x89 0x4 0x66 0x4 0xe>;
clock-names = “spi”, “pll_p”, “clk_m”;
resets = <0x5 0x5d>;
reset-names = “spi”;
status = “okay”;
linux,phandle = <0xf4>;
phandle = <0xf4>;
spi@0 {
compatible = “spidev”;
reg = <0x0>;
spi-max-frequency = <0x2faf080>;
controller-data {
nvidia,enable-hw-based-cs;
nvidia,rx-clk-tap-delay = <0x10>;
nvidia,tx-clk-tap-delay = <0x0>;
};
};
spi@1 {
compatible = “spidev”;
reg = <0x1>;
spi-max-frequency = <0x2faf080>;
controller-data {
nvidia,enable-hw-based-cs;
nvidia,rx-clk-tap-delay = <0x10>;
nvidia,tx-clk-tap-delay = <0x0>;
};
};
};(4)
sudo dtc -I dts -O dtb -o /boot/tegra194-p3668-all-p3509-0000-user-custom.dtb ~/user-custom.dts(5)reboot
通过以这种方式修改dts, spi1(master, spidev0.0)、spi3(slave, spidev2.0)被连接并按如下方式执行。
/spidev_test -D /dev/spidev2.0 -s 150000 -n10000 -g30 -p4 -z
./spidev_test -D /dev/spidev0.0 -s 150000 -n10000 -g30 -p4 -z结果如图所示
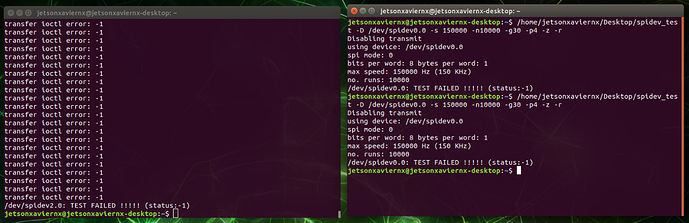
当我在从模式运行它,一个传输错误发生和主测试失败。
(5)让devmem2读取那些REG来确认设置。
使用了devmem2来临时更改寄存器值。
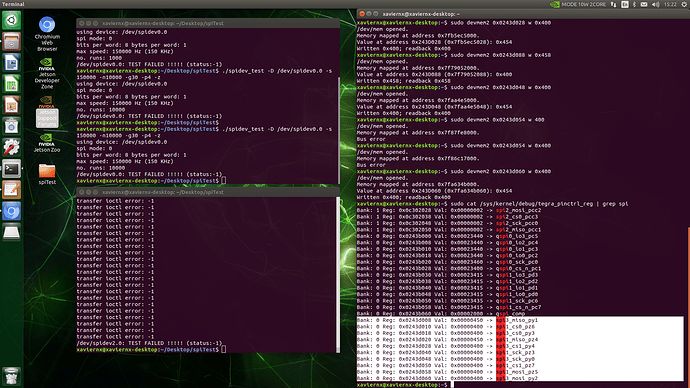
检查dmesg时,出现以下错误。
[ 280.340212] spi-tegra124-slave 3230000.spi: Tx is not supported in mode 0
[ 280.340215] spi-tegra124-slave 3230000.spi: spi can not start transfer, err -22
[ 280.340301] spi_master spi2: failed to transfer one message from queue
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:8042次2021-06-09 14:29:23
-
浏览量:8512次2021-06-09 14:49:23
-
浏览量:8205次2021-05-11 17:51:48
-
2021-05-06 16:03:00
-
浏览量:6740次2021-07-09 15:17:28
-
浏览量:9968次2021-05-19 17:32:00
-
浏览量:8513次2021-06-04 16:25:58
-
浏览量:9420次2021-05-14 14:43:43
-
浏览量:10536次2021-05-26 14:17:15
-
浏览量:9991次2021-04-27 17:56:41
-
浏览量:6686次2021-06-03 17:33:36
-
浏览量:12260次2021-05-06 16:22:01
-
浏览量:5643次2021-07-09 15:23:33
-
浏览量:7717次2021-05-11 17:04:57
-
浏览量:5660次2021-07-09 15:20:08
-
浏览量:5616次2021-05-10 17:48:42
-
浏览量:11212次2021-06-11 11:24:45
-
浏览量:7759次2021-05-20 16:37:42
-
浏览量:8181次2021-05-20 17:08:14
free-jdx
暂无个性签名~



-
178篇
-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
free-jdx

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
