

使用 OpenCV 替换图像的背景
一. 业务背景
在我们的某项业务中,需要通过自研的智能硬件“自动化”地拍摄一组组手机的照片,这些照片有时候因为光照的因素需要考虑将背景的颜色整体替换掉,然后再呈现给 C 端用户。这时就有背景替换的需求了。
二. 技术实现
使用 OpenCV ,通过传统的图像处理来实现这个需求。
方案一:
首先想到的是使用 K-means 分离出背景色。
大致的步骤如下:
将二维图像数据线性化
使用 K-means 聚类算法分离出图像的背景色
将背景与手机二值化
使用形态学的腐蚀,高斯模糊算法将图像与背景交汇处高斯模糊化
替换背景色以及对交汇处进行融合处理
k-平均算法(英文:k-means clustering)源于信号处理中的一种向量量化方法,现在则更多地作为一种聚类分析方法流行于数据挖掘领域。k-平均聚类的目的是:把 n 个点(可以是样本的一次观察或一个实例)划分到k个聚类中,使得每个点都属于离他最近的均值(此即聚类中心)对应的聚类,以之作为聚类的标准。这个问题将归结为一个把数据空间划分为Voronoi cells的问题。
K-means 算法思想为:给定n个数据点{x1,x2,…,xn},找到K个聚类中心{a1,a2,…,aK},使得每个数据点与它最近的聚类中心的距离平方和最小,并将这个距离平方和称为目标函数,记为Wn,其数学表达式为:

K-means 算法基本流程:
初始的 K 个聚类中心。
按照距离聚类中心的远近对所有样本进行分类。
重新计算聚类中心,判断是否退出条件:两次聚类中心的距离足够小视为满足退出条件;不退出则重新回到步骤2。
int main() {
Mat src = imread("test.jpg");
if (src.empty()) {
printf("could not load image...\n");
return -1;
}
imshow("origin", src);
// 将二维图像数据线性化
Mat data;
for (int i = 0; i < src.rows; i++) {//像素点线性排列
for (int j = 0; j < src.cols; j++)
{
Vec3b point = src.at<Vec3b>(i, j);
Mat tmp = (Mat_<float>(1, 3) << point[0], point[1], point[2]);
data.push_back(tmp);
}
}
// 使用K-means聚类
int numCluster = 4;
Mat labels;
TermCriteria criteria = TermCriteria(TermCriteria::EPS + TermCriteria::COUNT, 10, 0.1);
kmeans(data, numCluster, labels, criteria, 4, KMEANS_PP_CENTERS);
// 背景与手机二值化
Mat mask = Mat::zeros(src.size(), CV_8UC1);
int index = src.rows * 2 + 2; //获取点(2,2)作为背景色
int cindex = labels.at<int>(index);
/* 提取背景特征 */
for (int row = 0; row < src.rows; row++) {
for (int col = 0; col < src.cols; col++) {
index = row * src.cols + col;
int label = labels.at<int>(index);
if (label == cindex) { // 背景
mask.at<uchar>(row, col) = 0;
}
else {
mask.at<uchar>(row, col) = 255;
}
}
}
imshow("mask", mask);
// 腐蚀 + 高斯模糊:图像与背景交汇处高斯模糊化
Mat k = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));
erode(mask, mask, k);
GaussianBlur(mask, mask, Size(3, 3), 0, 0);
// 更换背景色以及交汇处融合处理
RNG rng(12345);
Vec3b color; //设置的背景色
color[0] = 255;//rng.uniform(0, 255);
color[1] = 255;// rng.uniform(0, 255);
color[2] = 255;// rng.uniform(0, 255);
Mat result(src.size(), src.type());
double w = 0.0; //融合权重
int b = 0, g = 0, r = 0;
int b1 = 0, g1 = 0, r1 = 0;
int b2 = 0, g2 = 0, r2 = 0;
for (int row = 0; row < src.rows; row++) {
for (int col = 0; col < src.cols; col++) {
int m = mask.at<uchar>(row, col);
if (m == 255) {
result.at<Vec3b>(row, col) = src.at<Vec3b>(row, col); // 前景
}
else if (m == 0) {
result.at<Vec3b>(row, col) = color; // 背景
}
else {/* 融合处理部分 */
w = m / 255.0;
b1 = src.at<Vec3b>(row, col)[0];
g1 = src.at<Vec3b>(row, col)[1];
r1 = src.at<Vec3b>(row, col)[2];
b2 = color[0];
g2 = color[1];
r2 = color[2];
b = b1 * w + b2 * (1.0 - w);
g = g1 * w + g2 * (1.0 - w);
r = r1 * w + r2 * (1.0 - w);
result.at<Vec3b>(row, col)[0] = b;
result.at<Vec3b>(row, col)[1] = g;
result.at<Vec3b>(row, col)[2] = r;
}
}
}
imshow("final", result);
waitKey(0);
return 0;- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
}
方案二:
方案一的算法并不是对所有手机都有效,对于一些浅色的、跟背景颜色相近的手机,该算法会比较无能为力。

于是换一个思路:
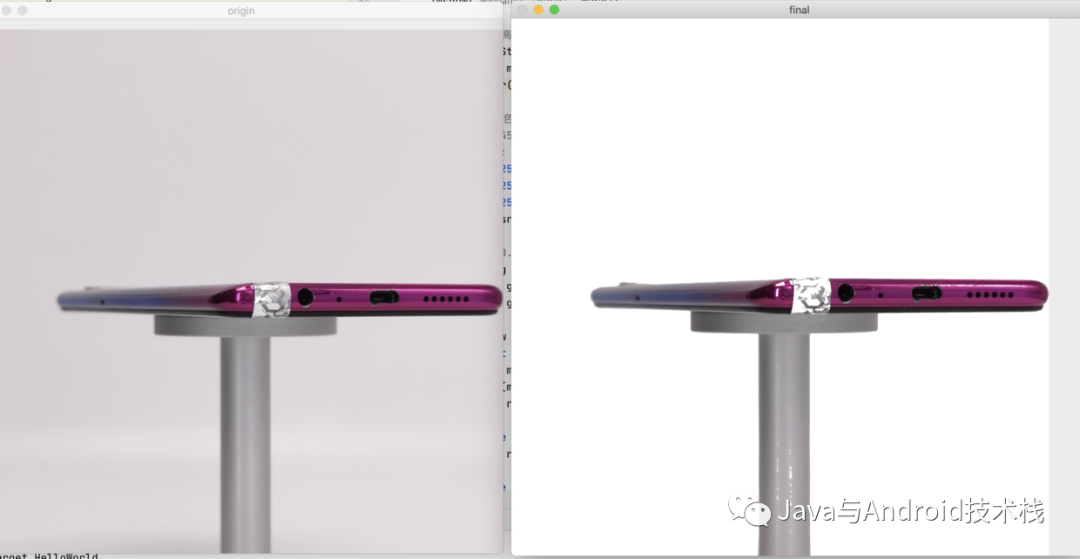
使用 USM 锐化算法对图像增强
再用纯白色的图片作为背景图,和锐化之后的图片进行图像融合。
图像锐化是使图像边缘更加清晰的一种图像处理方法。
USM(Unsharpen Mask) 锐化的算法就是对原图像先做一个高斯模糊,然后用原来的图像减去一个系数乘以高斯模糊之后的图像,然后再把值 Scale 到0~255的 RGB 素值范围之内。基于 USM 锐化的算法可以去除一些细小的干扰细节和噪声,比一般直接使用卷积锐化算子得到的图像锐化结果更加真实可信。
int main() {
Mat src = imread("./test.jpg");
if (src.empty()) {
printf("could not load image...\n");
return -1;
}
namedWindow("src", WINDOW_AUTOSIZE);
imshow("origin", src);
Mat blur_img, usm;
GaussianBlur(src, blur_img, Size(0, 0), 25);
addWeighted(src, 1.5, blur_img, -0.5, 0, usm);
imshow("usm", usm);
Mat roi = Mat(Size(src.cols,src.rows), CV_8UC3, Scalar(255, 255, 255));
Mat dst;
addWeighted(usm, 1.275, roi, 0.00015, 0, dst);
imshow("final", dst);
waitKey(0);
return 0;- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
}
其中,addWeighted 函数是将两张大小相同、类型相同的图片进行融合。数学公式如下:
三. 总结
其实,我尝试过用 OpenCV 多种方式实现该功能,也尝试过使用深度学习实现。目前还没有最满意的效果。后续,我会更偏向于使用深度学习来实现该功能。
来源:opencv学堂
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:724次2023-09-11 18:04:33
-
浏览量:1444次2023-12-19 16:51:40
-
浏览量:1406次2023-12-20 17:28:51
-
浏览量:4565次2021-01-12 18:43:19
-
浏览量:9587次2020-12-12 15:24:59
-
浏览量:1344次2023-12-20 16:40:32
-
浏览量:2803次2022-01-28 09:00:16
-
浏览量:834次2023-11-09 13:58:15
-
浏览量:4815次2021-01-21 14:02:11
-
浏览量:733次2023-12-19 11:06:03
-
浏览量:3535次2020-09-28 10:35:46
-
浏览量:995次2023-11-09 13:45:46
-
浏览量:1720次2023-07-14 14:36:03
-
浏览量:1819次2024-03-04 14:11:09
-
浏览量:1124次2023-07-17 13:57:30
-
浏览量:1286次2024-03-01 16:56:38
-
浏览量:1459次2024-03-04 14:48:01
-
浏览量:4832次2021-02-03 15:15:43
-
浏览量:4728次2020-12-22 11:08:31

易百纳技术社区
暂无个性签名~













-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
易百纳技术社区

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
