

nvidia nano平台通过tca9546适配两路imx219 sensor
1. 前言
nano平台原生是支持imx219驱动的;
但是如果要扩展多路imx219需要修改硬件和设备树的;
需要通过I2C一分四芯片,对四个imx219进行分时复用;
这里暂时只调试两路imx219
2. CSI接口连接如下
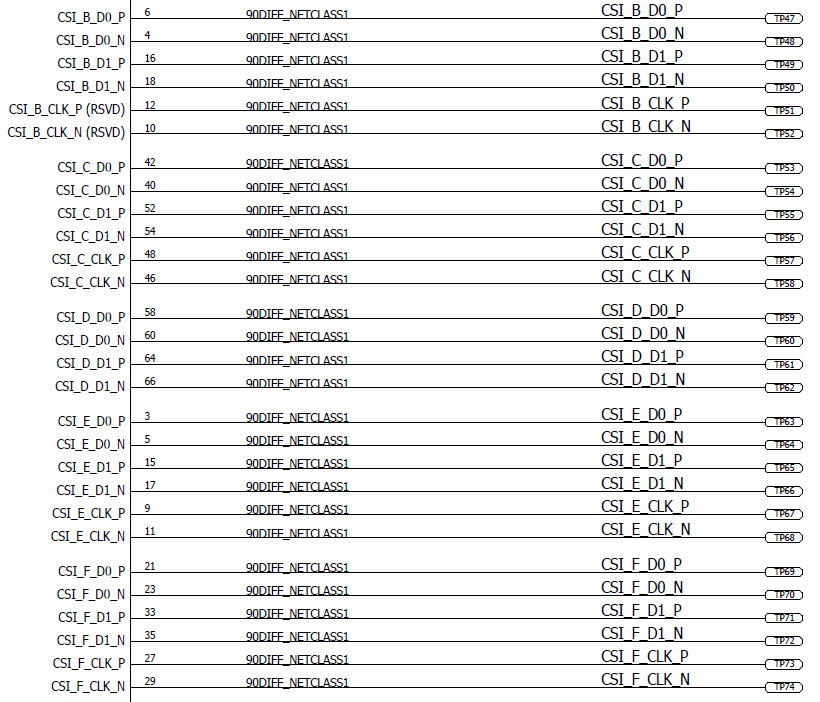
MIPI-CSI接口使用如下:
`
1 -> Ground
2 -> CAM1_DN0 - Data Lane 0
3 -> CAM1_DP0 - Data Lane 0
4 -> Ground
5 -> CAM1_DN1 - Data Lane 1
6 -> CAM1_DP1 - Data Lane 1
7 -> Ground
8 -> CAM1_CN - MIPI Clock
9 -> CAM1_CP - MIPI Clock
10 -> Ground
11 -> CAM_GPIO
12 -> CAM_CLK
13 -> SCL0 - CAM_I2C
14 -> SDA0 - CAM_I2C
15 -> +3.3 V`
3. 修改设备树
参考其它dts
`/i2c@3180000/tca9545@70/i2c@0/imx219 // for first camera
...
/i2c@3180000/tca9545@70/i2c@1/imx219 // for second camera`
修改如下:
tegra-camera-platform {
compatible = "nvidia, tegra-camera-platform";
status = "okay";
num_csi_lanes = <0x4>;
max_lane_speed = <0x16e360>;
min_bits_per_pixel = <0xa>;
vi_peak_byte_per_pixel = <0x2>;
vi_bw_margin_pct = <0x19>;
max_pixel_rate = <0x3a980>;
isp_peak_byte_per_pixel = <0x5>;
isp_bw_margin_pct = <0x19>;
modules {
module0 {
badge = "porg_front_RBPCV2";
position = "front";
orientation = [31 00];
drivernode0 {
pcl_id = "v4l2_sensor";
devname = "imx219 30-0010";
proc-device-tree = "/proc/device-tree/host1x/i2c@546c0000/tca9546@70/i2c@0/rbpcv2_imx219_a@10";
};
drivernode1 {
pcl_id = "v4l2_lens";
proc-device-tree = "/proc/device-tree/lens_imx219@RBPCV2/";
};
};
module1 {
badge = "porg_rear_RBPCV2";
position = "rear";
orientation = [31 00];
drivernode0 {
pcl_id = "v4l2_sensor";
devname = "imx219 31-0010";
proc-device-tree = "/proc/device-tree/host1x/i2c@546c0000/tca9546@70/i2c@1/rbpcv2_imx219_f@10";
};
drivernode1 {
pcl_id = "v4l2_lens";
proc-device-tree = "/proc/device-tree/lens_imx219@RBPCV2/";
};
};
};
};修改完后,驱动加载log如下:
[ 3.468532] i2c /dev entries driver
[ 3.470026] pca954x 6-0070: vcc-pullup regulator not found
[ 3.470043] pca954x 6-0070: pca954x_probe: forcing device bus number, start 30.
[ 3.470047] pca954x 6-0070: device detect skipped.
[ 3.470596] i2c i2c-6: Added multiplexed i2c bus 30
[ 3.470947] i2c i2c-6: Added multiplexed i2c bus 31
[ 3.471283] i2c i2c-6: Added multiplexed i2c bus 32
[ 3.471545] i2c i2c-6: Added multiplexed i2c bus 33
[ 3.471551] pca954x 6-0070: registered 4 multiplexed busses for I2C switch pca9546
[ 3.472267] imx219 30-0010: tegracam sensor driver:imx219_v2.0.6
[ 3.498487] imx219 31-0010: tegracam sensor driver:imx219_v2.0.6dev下成功生成两路videox设备
4. 查看节点信息
v4l2-ctl --list-devices
vi-output, imx219 30-0010 (platform:54080000.vi:0):
/dev/video0
vi-output, imx219 31-0010 (platform:54080000.vi:5):
/dev/video1media-ctl -p -d /dev/media0
Media controller API version 0.1.0
Media device information
------------------------
driver vi
model NVIDIA Tegra Video Input Device
serial
bus info
hw revision 0x3
driver version 0.0.0
Device topology
- entity 1: nvcsi--2 (2 pads, 2 links)
type V4L2 subdev subtype Unknown flags 0
device node name /dev/v4l-subdev0
pad0: Sink
<- "imx219 30-0010":0 [ENABLED]
pad1: Source
-> "vi-output, imx219 30-0010":0 [ENABLED]
- entity 4: imx219 30-0010 (1 pad, 1 link)
type V4L2 subdev subtype Sensor flags 0
device node name /dev/v4l-subdev1
pad0: Source
[fmt:SRGGB10_1X10/1280x720 field:none colorspace:srgb]
-> "nvcsi--2":0 [ENABLED]
- entity 6: vi-output, imx219 30-0010 (1 pad, 1 link)
type Node subtype V4L flags 0
device node name /dev/video0
pad0: Sink
<- "nvcsi--2":1 [ENABLED]
- entity 18: nvcsi--1 (2 pads, 2 links)
type V4L2 subdev subtype Unknown flags 0
device node name /dev/v4l-subdev2
pad0: Sink
<- "imx219 31-0010":0 [ENABLED]
pad1: Source
-> "vi-output, imx219 31-0010":0 [ENABLED]
- entity 21: imx219 31-0010 (1 pad, 1 link)
type V4L2 subdev subtype Sensor flags 0
device node name /dev/v4l-subdev3
pad0: Source
[fmt:SRGGB10_1X10/3280x2464 field:none colorspace:srgb]
-> "nvcsi--1":0 [ENABLED]
- entity 23: vi-output, imx219 31-0010 (1 pad, 1 link)
type Node subtype V4L flags 0
device node name /dev/video1
pad0: Sink
<- "nvcsi--1":1 [ENABLED]5. 采集图像
cmd如下:
gst-launch-1.0 nvarguscamerasrc sensor-id=0 ! ‘video/x-raw(memory:NVMM),width=1280, height=720, framerate=30/1, format=NV12’ ! nvvidconv flip-method=0 ! ‘video/x-raw,width=640, height=480, format=(string)UYVY’ ! nvvidconv ! nvegltransform ! nveglglessink -eSetting pipeline to PAUSED ...
Using winsys: x11
Pipeline is live and does not need PREROLL ...
Got context from element 'eglglessink0': gst.egl.EGLDisplay=context, display=(GstEGLDisplay)NULL;
Setting pipeline to PLAYING ...
New clock: GstSystemClock
GST_ARGUS: Creating output stream
CONSUMER: Waiting until producer is connected...
GST_ARGUS: Available Sensor modes :
GST_ARGUS: 3280 x 2464 FR = 21,000000 fps Duration = 47619048 ; Analog Gain range min 1,000000, max 10,625000; Exposure Range min 13000, max 683709000;
GST_ARGUS: 3280 x 1848 FR = 28,000001 fps Duration = 35714284 ; Analog Gain range min 1,000000, max 10,625000; Exposure Range min 13000, max 683709000;
GST_ARGUS: 1920 x 1080 FR = 29,999999 fps Duration = 33333334 ; Analog Gain range min 1,000000, max 10,625000; Exposure Range min 13000, max 683709000;
GST_ARGUS: 1280 x 720 FR = 59,999999 fps Duration = 16666667 ; Analog Gain range min 1,000000, max 10,625000; Exposure Range min 13000, max 683709000;
GST_ARGUS: 1280 x 720 FR = 120,000005 fps Duration = 8333333 ; Analog Gain range min 1,000000, max 10,625000; Exposure Range min 13000, max 683709000;
GST_ARGUS: Running with following settings:
Camera index = 0
Camera mode = 4
Output Stream W = 1280 H = 720
seconds to Run = 0
Frame Rate = 120,000005
GST_ARGUS: PowerService: requested_clock_Hz=6048000
GST_ARGUS: Setup Complete, Starting captures for 0 seconds
GST_ARGUS: Starting repeat capture requests.
CONSUMER: Producer has connected; continuing.
^Chandling interrupt.
Interrupt: Stopping pipeline ...
EOS on shutdown enabled -- Forcing EOS on the pipeline
Waiting for EOS...
Got EOS from element "pipeline0".
EOS received - stopping pipeline...
Execution ended after 0:00:04.245766040
Setting pipeline to PAUSED ...
Setting pipeline to READY ...
GST_ARGUS: Cleaning up
GST_ARGUS:
PowerServiceHwVic::cleanupResources
CONSUMER: Done Success
GST_ARGUS: Done Success
Setting pipeline to NULL ...
Freeing pipeline ...dmesg | grep imx219
[ 3.580410] imx219 30-0010: tegracam sensor driver:imx219_v2.0.6
[ 3.606567] imx219 31-0010: tegracam sensor driver:imx219_v2.0.6
[ 4.578752] vi 54080000.vi: subdev imx219 30-0010 bound
[ 4.579471] vi 54080000.vi: subdev imx219 31-0010 bound
[ 345.055162] imx219 30-0010: imx219_power_on: power on
[ 345.118384] imx219 30-0010: imx219_set_gain: val: 71 (/16) [times], gain: 199
[ 345.118930] imx219 30-0010: imx219_set_exposure: val: 29999 [us], coarse_time: 1475 [lines]
[ 345.120128] imx219 30-0010: imx219_set_frame_rate: val: 30000001e-6 [fps], frame_length: 1639 [lines]
[ 345.177118] imx219 30-0010: imx219_power_off: power off
[ 345.177236] imx219 31-0010: imx219_power_on: power on
[ 345.294933] imx219 31-0010: imx219_power_off: power off
[ 345.295038] imx219 30-0010: imx219_power_on: power on
[ 345.318297] imx219 30-0010: imx219_power_off: power off
[ 345.318499] imx219 31-0010: imx219_power_on: power on
[ 345.341729] imx219 31-0010: imx219_power_off: power off
[ 345.344452] imx219 30-0010: imx219_power_on: power on
[ 345.367759] imx219 30-0010: imx219_power_off: power off
[ 345.368009] imx219 31-0010: imx219_power_on: power on
[ 345.391253] imx219 31-0010: imx219_power_off: power off
[ 345.415826] imx219 31-0010: imx219_power_on: power on
[ 345.439043] imx219 31-0010: imx219_power_off: power off
[ 345.439288] imx219 30-0010: imx219_power_on: power on
[ 345.462517] imx219 30-0010: imx219_power_off: power off
[ 345.462697] imx219 30-0010: imx219_power_on: power on
[ 345.485950] imx219 30-0010: imx219_power_off: power off
[ 345.486170] imx219 30-0010: imx219_power_on: power on
[ 345.509733] imx219 30-0010: imx219_power_off: power off
[ 345.546095] imx219 31-0010: imx219_power_on: power on
[ 345.569274] imx219 31-0010: imx219_power_off: power off
[ 345.569441] imx219 30-0010: imx219_power_on: power on
[ 345.592633] imx219 30-0010: imx219_power_off: power off
[ 345.592875] imx219 30-0010: imx219_power_on: power on
[ 345.616223] imx219 30-0010: imx219_power_off: power off
[ 345.616647] imx219 30-0010: imx219_power_on: power on
[ 345.640093] imx219 30-0010: imx219_power_off: power off
[ 345.920997] imx219 30-0010: imx219_power_on: power on
[ 345.944266] imx219 30-0010: imx219_set_frame_rate: val: 120000000e-6 [fps], frame_length: 409 [lines]
[ 345.945262] imx219 30-0010: imx219_set_gain: val: 16 (/16) [times], gain: 0
[ 345.945736] imx219 30-0010: imx219_set_exposure: exposure limited by frame_length: 405 [lines]
[ 345.945740] imx219 30-0010: imx219_set_exposure: val: 8333 [us], coarse_time: 405 [lines]
[ 345.949261] imx219 30-0010: imx219_set_frame_rate: val: 30000001e-6 [fps], frame_length: 1639 [lines]
[ 345.950324] imx219 30-0010: imx219_set_exposure: exposure limited by frame_length: 1635 [lines]
[ 345.950329] imx219 30-0010: imx219_set_exposure: val: 33330 [us], coarse_time: 1635 [lines]
[ 345.994944] imx219 30-0010: imx219_set_gain: val: 16 (/16) [times], gain: 0
[ 345.995417] imx219 30-0010: imx219_set_exposure: exposure limited by frame_length: 1635 [lines]
[ 345.995422] imx219 30-0010: imx219_set_exposure: val: 33330 [us], coarse_time: 1635 [lines]
[ 345.996363] imx219 30-0010: imx219_set_frame_rate: val: 30000001e-6 [fps], frame_length: 1639 [lines]
[ 346.002546] imx219 30-0010: imx219_set_frame_rate: val: 120000000e-6 [fps], frame_length: 409 [lines]
[ 346.012095] imx219 30-0010: imx219_set_frame_rate: val: 30000001e-6 [fps], frame_length: 1639 [lines]
[ 346.240710] imx219 30-0010: imx219_set_gain: val: 20 (/16) [times], gain: 52
[ 346.275141] imx219 30-0010: imx219_set_gain: val: 24 (/16) [times], gain: 86
[ 346.309575] imx219 30-0010: imx219_set_gain: val: 27 (/16) [times], gain: 105
[ 346.343922] imx219 30-0010: imx219_set_gain: val: 30 (/16) [times], gain: 120
[ 346.344622] imx219 30-0010: imx219_set_exposure: exposure limited by frame_length: 1635 [lines]
[ 346.344627] imx219 30-0010: imx219_set_exposure: val: 33329 [us], coarse_time: 1635 [lines]
[ 346.378355] imx219 30-0010: imx219_set_exposure: exposure limited by frame_length: 1635 [lines]
[ 346.378361] imx219 30-0010: imx219_set_exposure: val: 33330 [us], coarse_time: 1635 [lines]
[ 346.412794] imx219 30-0010: imx219_set_gain: val: 31 (/16) [times], gain: 124
[ 346.413410] imx219 30-0010: imx219_set_exposure: exposure limited by frame_length: 1635 [lines]
[ 346.413416] imx219 30-0010: imx219_set_exposure: val: 33329 [us], coarse_time: 1635 [lines]
[ 346.447166] imx219 30-0010: imx219_set_gain: val: 32 (/16) [times], gain: 128
[ 346.447718] imx219 30-0010: imx219_set_exposure: exposure limited by frame_length: 1635 [lines]
[ 346.447723] imx219 30-0010: imx219_set_exposure: val: 33330 [us], coarse_time: 1635 [lines]
[ 346.481616] imx219 30-0010: imx219_set_gain: val: 34 (/16) [times], gain: 136
[ 346.516007] imx219 30-0010: imx219_set_gain: val: 37 (/16) [times], gain: 146
[ 346.550352] imx219 30-0010: imx219_set_gain: val: 39 (/16) [times], gain: 151
[ 346.584822] imx219 30-0010: imx219_set_gain: val: 41 (/16) [times], gain: 157
[ 346.619141] imx219 30-0010: imx219_set_gain: val: 43 (/16) [times], gain: 161
[ 346.653599] imx219 30-0010: imx219_set_gain: val: 44 (/16) [times], gain: 163
[ 346.654274] imx219 30-0010: imx219_set_exposure: exposure limited by frame_length: 1635 [lines]
[ 346.654279] imx219 30-0010: imx219_set_exposure: val: 33329 [us], coarse_time: 1635 [lines]
[ 346.687967] imx219 30-0010: imx219_set_gain: val: 45 (/16) [times], gain: 165
[ 346.688814] imx219 30-0010: imx219_set_exposure: exposure limited by frame_length: 1635 [lines]
[ 346.688824] imx219 30-0010: imx219_set_exposure: val: 33330 [us], coarse_time: 1635 [lines]
[ 346.722348] imx219 30-0010: imx219_set_gain: val: 47 (/16) [times], gain: 169
[ 346.722948] imx219 30-0010: imx219_set_exposure: exposure limited by frame_length: 1635 [lines]
[ 346.722953] imx219 30-0010: imx219_set_exposure: val: 33329 [us], coarse_time: 1635 [lines]
[ 346.756768] imx219 30-0010: imx219_set_gain: val: 48 (/16) [times], gain: 171
[ 346.757441] imx219 30-0010: imx219_set_exposure: exposure limited by frame_length: 1635 [lines]
[ 346.757447] imx219 30-0010: imx219_set_exposure: val: 33330 [us], coarse_time: 1635 [lines]
[ 346.791252] imx219 30-0010: imx219_set_gain: val: 50 (/16) [times], gain: 175
[ 346.791865] imx219 30-0010: imx219_set_exposure: exposure limited by frame_length: 1635 [lines]
[ 346.791871] imx219 30-0010: imx219_set_exposure: val: 33329 [us], coarse_time: 1635 [lines]
[ 346.825565] imx219 30-0010: imx219_set_gain: val: 56 (/16) [times], gain: 183
[ 346.826113] imx219 30-0010: imx219_set_exposure: val: 29999 [us], coarse_time: 1475 [lines]
[ 346.859983] imx219 30-0010: imx219_set_gain: val: 58 (/16) [times], gain: 186
[ 346.894372] imx219 30-0010: imx219_set_gain: val: 59 (/16) [times], gain: 187
[ 346.928807] imx219 30-0010: imx219_set_gain: val: 60 (/16) [times], gain: 188
[ 346.997648] imx219 30-0010: imx219_set_gain: val: 62 (/16) [times], gain: 190
[ 347.032011] imx219 30-0010: imx219_set_gain: val: 64 (/16) [times], gain: 192
[ 347.066606] imx219 30-0010: imx219_set_gain: val: 65 (/16) [times], gain: 193
[ 347.100776] imx219 30-0010: imx219_set_gain: val: 67 (/16) [times], gain: 195
[ 347.203991] imx219 30-0010: imx219_set_gain: val: 68 (/16) [times], gain: 196
[ 347.272904] imx219 30-0010: imx219_set_gain: val: 70 (/16) [times], gain: 198
[ 349.457148] imx219 30-0010: imx219_power_off: power off驱动运行起来还有点问题
6. 继续修改设备树
kernel_src\hardware\nvidia\platform\t210\porg\kernel-dts\porg-platforms\tegra210-camera-rbpcv2-dual-imx219.dtsi
...
tegra-camera-platform {
isp_bw_margin_pct = <0x19>;
compatible = "nvidia, tegra-camera-platform";
max_pixel_rate = <0x3a980>;
num_csi_lanes = <0x4>;
vi_peak_byte_per_pixel = <0x2>;
status = "okay";
max_lane_speed = <0x16e360>;
vi_bw_margin_pct = <0x19>;
min_bits_per_pixel = <0xa>;
isp_peak_byte_per_pixel = <0x5>;
modules {
module0 {
badge = "porg_front_RBPCV2";
position = "front";
orientation = [31 00];
drivernode1 {
pcl_id = "v4l2_lens";
proc-device-tree = "/proc/device-tree/lens_imx219@RBPCV2/";
};
drivernode0 {
devname = "imx219 30-0010";
pcl_id = "v4l2_sensor";
proc-device-tree = "/proc/device-tree/host1x/i2c@546c0000/tca9546@70/i2c@0/rbpcv2_imx219_a@10";
};
};
module1 {
badge = "porg_rear_RBPCV2";
position = "rear";
orientation = [32 00];
drivernode1 {
pcl_id = "v4l2_lens";
proc-device-tree = "/proc/device-tree/lens_imx219@RBPCV2/";
};
drivernode0 {
devname = "imx219 31-0010";
pcl_id = "v4l2_sensor";
proc-device-tree = "/proc/device-tree/host1x/i2c@546c0000/tca9546@70/i2c@1/rbpcv2_imx219_f@10";
};
};
};
};
...
module0 {
badge = "porg_center_RBPCV2";
position = "center";
orientation = [31 00];
drivernode0 {
pcl_id = "v4l2_sensor";
devname = "imx219 30-0010";
proc-device-tree = "/proc/device-tree/host1x/i2c@546c0000/tca9546@70/i2c@0/rbpcv2_imx219_a@10";
};
drivernode1 {
pcl_id = "v4l2_lens";
proc-device-tree = "/proc/device-tree/lens_imx219@RBPCV2/";
};
};
module1 {
badge = "porg_top_RBPCV2";
position = "top";
orientation = [31 00];
drivernode0 {
pcl_id = "v4l2_sensor";
devname = "imx219 31-0010";
proc-device-tree = "/proc/device-tree/host1x/i2c@546c0000/tca9546@70/i2c@1/rbpcv2_imx219_f@10";
};
drivernode1 {
pcl_id = "v4l2_lens";
proc-device-tree = "/proc/device-tree/lens_imx219@RBPCV2/";
};
};badge = "porg_center_RBPCV2";
position = "center";
badge = "porg_top_RBPCV2";
position = "top";
badge = "imx219_top_RBPCV2";
position = "top";
badge = "imx219_center_RBPCV2";
position = "center";
badge = "imx219_front_RBPCV2";
position = "front";
badge = "imx219_rear_RBPCV2";
position = "rear";按照上面修改后,图像采集正常
7. 原因分析
由于dts中的port节点,module中的节点有一定关联性;
很容易混淆错乱,需要严格根据硬件特性 以及 nvidia的规则来修改
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
-
浏览量:2205次2020-08-10 19:19:56
-
浏览量:11580次2021-03-03 17:39:18
-
浏览量:5203次2021-05-17 17:26:59
-
浏览量:9758次2021-03-16 17:25:52
-
浏览量:5865次2021-08-05 13:59:50
-
浏览量:8003次2021-08-04 17:14:53
-
浏览量:6084次2021-08-05 13:55:51
-
浏览量:5180次2020-03-12 22:02:40
-
浏览量:9074次2020-11-26 14:22:19
-
浏览量:10036次2021-07-21 16:55:40
-
浏览量:2915次2024-01-08 17:24:15
-
浏览量:4608次2020-09-24 11:58:24
-
浏览量:4570次2024-01-02 22:42:19
-
浏览量:8267次2020-09-03 17:44:35
-
浏览量:1228次2023-11-30 19:11:02
-
浏览量:12260次2021-05-06 16:22:01
-
浏览量:3832次2021-12-04 14:20:29
-
浏览量:12926次2021-06-16 17:06:40
-
浏览量:5448次2020-08-14 11:29:53
free-jdx
暂无个性签名~



-
178篇
-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
free-jdx

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820

tca9546
i2c 一分四是啥芯片?