

技术专栏
全志平台N3模块调试(1)方案分析&驱动配置
1. 前言
由于需要在V5平台接四路相机用于环视使用;
普遍是有模拟相机和数字相机两种选择。
2. 相机优缺点分析
模拟相机:
便宜、接线方便可以长距离传输、方便支持多路视频采集
数字相机:
贵,常规mipi不支持长距离传输,调试ISP复杂
【其实也有长距离传输的数字相机,例如fpdlink和gmsl,只是整体方案价格比较贵】
最终选择模拟方案,这里用的是nextchip的N3芯片
3. 接口分析
N3 支持4路 CVBS/AHD 1.0 /AHD2.0 模拟相机输入,一路BT656 或 BT1120 YUV422输出;
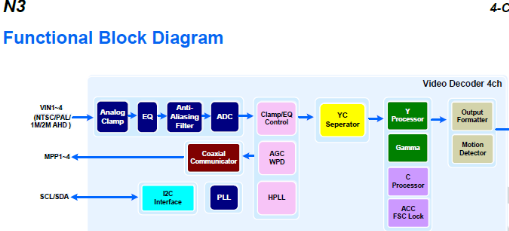
V5平台正好支持两路BT656和BT1120接口输入。
4. 底层环境配置
底层环境主要包括camera驱动移植和sysconfig配置
(1)N3驱动适配
按照NVP原厂提供的配置表,根据全志平台通用驱动修改相应驱动
有几个关键的地方需要修改,如下:
a. 通道设置
通用驱动中查找sensor_g_mbus_config接口;
这里设置了两个CH通路
cfg->type = V4L2_MBUS_BT656;
cfg->flags = CLK_POL | CSI_CH_0 | CSI_CH_1;b. 格式设置
这里YUV格式是根据N3的实际输出的图像格式来设置的
.desc = "BT656 4CH",
.mbus_code = MEDIA_BUS_FMT_YUYV8_2X8,
.regs = NULL,
.regs_size = 0,
.bpp = 2,c. 编译模块
添加驱动模块编译成驱动模块
obj-m += n3/(2)sysconfig配置
pinmux配置如下:
低八位对齐
csi2_used = 1
csi2_pck = port:PE00<2><default><default><default>
csi2_hsync = port:PE02<2><default><default><default>
csi2_vsync = port:PE03<2><default><default><default>
csi2_d0 = port:PE04<2><default><default><default>
csi2_d1 = port:PE05<2><default><default><default>
csi2_d2 = port:PE06<2><default><default><default>
csi2_d3 = port:PE07<2><default><default><default>
csi2_d4 = port:PE08<2><default><default><default>
csi2_d5 = port:PE09<2><default><default><default>
csi2_d6 = port:PE10<2><default><default><default>
csi2_d7 = port:PE11<2><default><default><default>
;csi2_d8 = port:PE12<2><default><default><default>
;csi2_d9 = port:PE13<2><default><default><default>
;csi2_d10 = port:PE14<2><default><default><default>
;csi2_d11 = port:PE15<2><default><default><default>I2C配置如下:
由于使用的是twi2,所以只需要开启twi2即可
[twi2]
twi2_used = 1
twi2_scl = port:PI01<5><default><default><default>
twi2_sda = port:PI02<5><default><default><default>sensor配置如下:
[vind0/sensor1]
sensor1_used = 1
sensor1_mname = "nvp6124"
;use twi 2 group
sensor1_twi_cci_id = 0
sensor1_twi_addr = 0x60
;use mclk 0 group
sensor1_mclk_id = 2
sensor1_pos = "rear"
sensor1_isp_used = 0
sensor1_fmt = 0
sensor1_vflip = 0
sensor1_hflip = 0
sensor1_iovdd = "iovdd-csi"
sensor1_iovdd_vol = 3300000
sensor1_avdd = ""
sensor1_avdd_vol =
sensor1_dvdd = "dvdd-csi"
sensor1_dvdd_vol = 1800000
;AHD power
sensor1_power_en =
sensor1_reset = port:PB05<1><0><1><0>
sensor1_pwdn = port:PB08<1><0><1><1>两路video通路配置如下:
实际只需要接入两路AHD相机,所以这里只配置了两路video通路
[vind0/vinc0]
vinc0_used = 1
vinc0_csi_sel = 0
vinc0_mipi_sel = 0xff
vinc0_isp_sel = 0
vinc0_isp_tx_ch = 0
vinc0_rear_sensor_sel = 0
vinc0_front_sensor_sel = 0
vinc0_sensor_list = 0
[vind0/vinc1]
vinc1_used = 1
vinc1_csi_sel = 0
vinc1_mipi_sel = 0xff
vinc1_isp_sel = 0
vinc1_isp_tx_ch = 0
vinc1_rear_sensor_sel = 0
vinc1_front_sensor_sel = 0
vinc1_sensor_list = 0(3)加载驱动
insmod /lib/modules/4.4.55/videobuf2-dma-contig.ko
insmod /lib/modules/4.4.55/vin_io.ko
insmod /lib/modules/4.4.55/nvp6134.ko
insmod /lib/modules/4.4.55/vin_v4l2.ko按照上面搭建好底层调试环境后,加载上述驱动后,会出现四个video设备;
分别为video0/1/2/3
声明:本文内容由易百纳平台入驻作者撰写,文章观点仅代表作者本人,不代表易百纳立场。如有内容侵权或者其他问题,请联系本站进行删除。
红包
241
33
评论
打赏
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
评论
0个
手气红包
 暂无数据
暂无数据相关专栏
-
浏览量:7347次2020-11-26 17:02:47
-
浏览量:10924次2020-11-26 15:59:29
-
浏览量:9362次2021-01-20 17:04:49
-
浏览量:8616次2021-01-08 15:04:53
-
浏览量:9876次2020-09-08 19:26:12
-
浏览量:6902次2020-10-21 16:08:13
-
浏览量:7856次2020-09-10 09:46:52
-
浏览量:7913次2021-01-16 14:52:44
-
浏览量:11674次2020-12-16 18:56:54
-
浏览量:15210次2020-09-07 11:31:46
-
浏览量:7131次2021-01-08 15:16:17
-
浏览量:15626次2021-01-16 15:43:02
-
浏览量:4858次2020-09-23 19:01:05
-
浏览量:6824次2021-01-15 17:26:20
-
浏览量:10954次2021-01-22 16:07:20
-
浏览量:12033次2020-12-16 19:13:45
-
浏览量:7701次2020-09-28 16:30:39
-
浏览量:11778次2020-10-13 17:41:07
-
浏览量:7648次2021-01-22 15:28:47
关于作者
free-jdx
暂无个性签名~
原创178
阅读129.3w
收藏16
点赞35
评论28


切换马甲
上一页
下一页
打赏用户
共 1 位

我要创作
分享技术经验,可获取创作收益
分类专栏
-
178篇
置顶时间设置
结束时间
删除原因
-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
打赏作者
free-jdx
您的支持将鼓励我继续创作!
打赏金额:
¥1
¥5
¥10
¥50
¥100
支付方式:
 微信支付
微信支付
举报反馈
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
发布时间设置
发布时间:
请选择发布时间设置
是否关联周任务-专栏模块
审核失败
失败原因
请选择失败原因
备注
请输入备注



关注公众号
联系我们
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
回顶部
