

近距离对比激光雷达和双目立体视觉

一辆自动驾驶汽车同时拥有两项物体识别技术,孰优孰劣?
自动驾驶车辆通常会部署多个传感器系统用于环境感知,其中最受欢迎的是激光雷达、毫米波雷达和摄像机模组。 这些传感器系统协同工作,提供对外部世界的车辆、行人、自行车手、标志等的全面反映,其中重叠的功能也会产生冗余,确保如果一个系统出现故障,另一个系统将填补空白。
毫米波雷达是大多数汽车传感器套件的组成部分之一。 作为相对低成本、可靠且已久经考验的技术,它能够在合理距离内检测较大目标、在低光照和恶劣环境中表现更为优异,而这两点在自动驾驶业内绝对是强大优势。 然而,由于毫米波雷达很难探测到较小的目标并进行有效识别,因此它只是解决方案中的一个组成部分,作为主要传感模式(如激光雷达或摄像机)的重要补充。

安装在汽车保险杠后的毫米波雷达模块。
激光雷达技术可测量距离,工作原理是通过计算向目标发射探测信号,以及从物体上反射并返回本地传感器所需的时间。 成对使用的摄像机(例如双目摄像机)也能测距,其工作原理是从两个不同视角(即两个摄像机)获取的视觉信息进行三角测量。
双目立体视觉和激光雷达各自都具备作为车辆自动驾驶的主要传感器系统所需的能力,尤其是他们可以同时部署产生冗余。 那么,这两种感知方式的优缺点是什么呢?
双“术”记
双目立体视觉和激光雷达都能进行距离测量、深度预估和密集点云生成(即 3D 环境测绘)。 两者也都能产生丰富的数据集,不仅可用于检测物体,也可在高速、各种路况以及长短距离内识别物体。 二者各有利弊,但孰优孰劣呢?
如前所述,激光雷达使用的原理与声呐相似,都是通过发射激光脉冲计算信号被物体反射到接收器所需的时间来确定车辆与现实场景的距离。 信号强度越大,测距数值的准确度也就更高,毫无疑问这是喜闻乐见。 通常,会由多个激光束 360 度旋转(通过物理或逻辑)扫描以获取车辆周遭的情况。
激光雷达已然成为自动驾驶技术历史进程中一项重要的传感技术。 因其精确的测距、可靠性和易用性,初代的自动驾驶技术原型依赖着激光雷达。 例如,在 2004 年开始的 DARPA 自动驾驶挑战赛中,大多数的参赛选手都依赖激光雷达技术。

激光雷达的优点很容易理解,事实上,大多数现代自动驾驶技术原型也仍将它作为主要的传感模式。它的优点在于:
- 高精度(测距精确到厘米)
- 高数据率(机械旋转激光雷达每秒可高达 20 转及以上)
- 稳定性和可靠性
- 可验证
- 目标识别不受温度和光线影响
尽管激光雷达有许多优点,但仍有一定的技术局限性。
它的短板在于:
- 恶劣环境下的“误报”:因雨、雾和灰尘引起的反射会产生误报。虽然这些问题可通过专用算法来解决,但天气仍然会影响着激光雷达系统。
- 人眼安全规定限制了激光雷达的信号强度,这一限制使得我们在视场角、分辨率和距离之间不得不做取舍。
- 激光雷达测量的有效性与物体反射率有关。如果发射的信号遇到一个可反射物体,按照预期它的大部分信号会反弹回接收器,并成功检测到目标。然而,如果信号遇到反射性差的障碍物,例如黑色的车辆,信号的能量可能只会返回部分,从而降低检测的可靠性。庆幸的是,大多数汽车、摩托车、自行车和行人通常都具有足够的反射性,可以通过激光雷达进行探测,这也是为什么激光雷达在业内得到如此广泛应用。
那双目立体视觉呢?它的竞争优势又在哪里?
双目立体视觉是通过处理同一环境中的两个独立图像来判断距离,这些图像是同时从两个相邻的视点获取。在自动驾驶技术的早期(90年代末到 21 世纪初),计算机视觉技术还处于起步阶段,再加上一些其他因素,引发了一系列问题,使得双目立体视觉没能成为自动驾驶的主流感知器的首选。
双目立体视觉曾被认为有以下不足之处:
- 低分辨率相机拍摄的远距离图像模糊
- 低光照环境图像质量差
- 对计算资源要求高(计算机视觉处理需要多台计算机)
- 行车过程中摄像机未校准时,需要手动调整
- 当时,这些问题的严重性足以阻止双目立体视觉成为可行的自主感知替代方案。而在竞争对手“缺席”情况下,激光雷达蓬勃发展。
然而,后续的重大技术革新使双目立体视觉变得更有吸引力:
- 低成本、高分辨率的摄像机(现在已经有800万像素的摄像机)
- 先进的 ISP 配备了 HDR 和低光照图像处理技术,可用于夜间驾驶
- 专为实时计算机视觉处理而设计的嵌入式 SoC
- 自动进行的摄像机动态校准(稍后会着重介绍)
这些发展逐渐凝聚起来,并扭转了双目立体视觉在自动驾驶领域的小众局面,已然使双目立体视觉成为主流感知方式强有力的竞争者。
双目立体视觉在现今的自动驾驶汽车中表现如何?
在提及障碍物检测与识别技术时,最重要的性能指标就是分辨率:每秒能提供多少距离测量和估量数据?数字越大就代表了汽车周围环境的 3D 场景重建就越精准。总的来说,搭载当今这代摄像机,双目立体视觉每秒可以获得 2000 个左右的垂直方向的采样。将这一数字与激光雷达每秒 128 个垂直采样进行比较,显而易见,双目立体视觉能提供远高于对手的分辨率。

双目立体视觉密度(左)与激光雷达密度(右)的比较。
从上面图像的对比来看(两幅图像的彩色像素表示传感器的测量值,不同颜色代表每个传感器刻度上的测量距离),左侧的双目立体视觉解决方案提供更大的环境覆盖范围,而右侧的激光雷达输出显示则要稀疏得多。
使用下面图像局部仔细检查,不难发现其中差异:通过双目立体视觉产生的数据更丰富,这也使得障碍物检测和辨识更加容易。
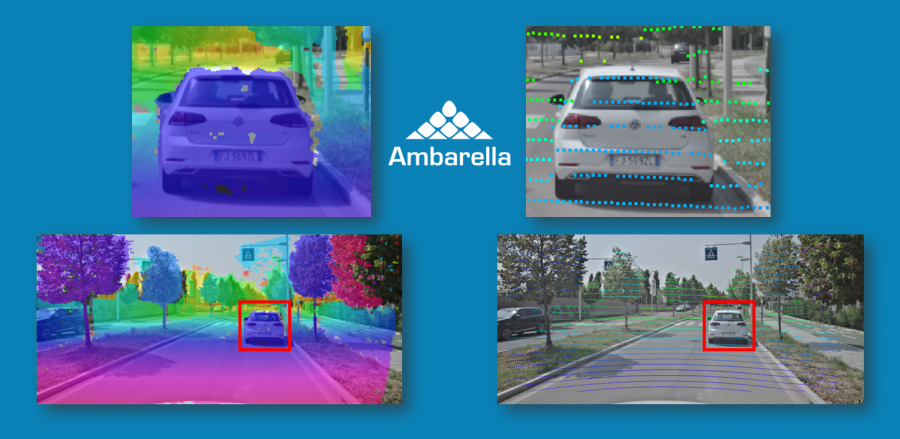
双目立体视觉密度(左)与激光雷达密度(右)的特写比较。
双目立体视觉不仅可用于白天,它在低光照情况下也同样强大。下图显示了夜间驾驶时相同场景的信息密度比较。
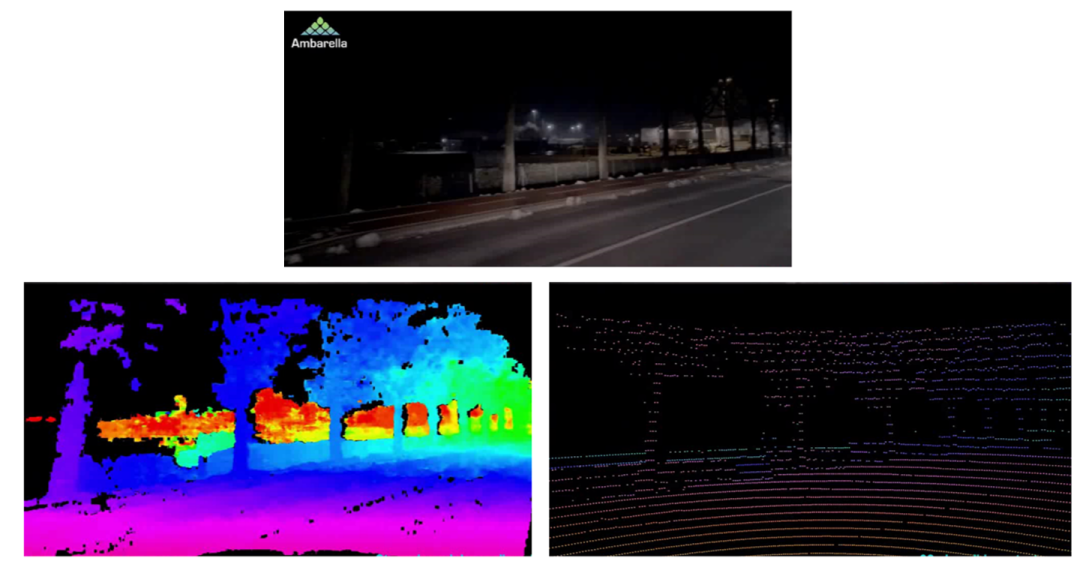
双目立体视觉密度(左)与激光雷达密度(右)的夜间比较。
准确度是另一个重要指标。双目立体视觉不提供直接的距离测量结果;相反,它提供距离估计数据,因为距离是个派生量,是通过处理两个图像信息间接获得的测量值。无论是在远距离(不强制要求精准测量距离)还是在近距离(执行精确操作需要高精度),双目立体视觉都能提供自动驾驶应用所需的精度水准。例如,在近距离时,双目立体可提供毫米级的距离感知。
除了分辨率和精准度,现今双目立体视觉还有哪些优点?
- 一对双目摄像机中的每一个都能“单兵作战”,可提供自带的视觉冗余系统。
- 双目立体摄像机所提供的双图像可同时用于执行单目 CNN 算法,比如在同一个芯片上进行物体分类。
- 双目立体视觉能检测通用 3D 形状,即使是那些尚未被归类为已知障碍物的形状,比如从其他车辆上滑落的石块、各种碎片或者随机物体(例如梯子或床垫),这些都能被双目立体系统检测到,甚至类似坑洞的负障碍也能被精准探测到。
- 双目立体摄像机比起激光雷达还更低成本,这绝对是大批量应用的考虑重点。他们不需要安装运动部件就可自动调整,而且功耗极低。
- 双目立体视觉的运行速度以帧率计算(超高清图像的是 30 帧/秒)。Ambarella 的双目立体视觉芯片内建了双目立体视觉加速引擎,所以具有极高的数据处理能力。
- 双目立体摄像机自动校准。为了保证双目立体视觉功能运行正常,两个摄像机的位置必须保持相对固定;否则,测量数据将会有所偏差。典型的驾驶环境中震动和冲击在所难免,这也挑战着双目系统的运行。正是考虑到这一点,Ambarella 研发了实时自动校准程序,该程序可抵消车辆在正常运行时因为震动而可能产生的双目摄像机之间的微小错位。这最大程度上保证了我们的双目立体视觉处理的精准度。
声明:本文出自公众号【Ambarella安霸半导体】,转载目的在于信息传递,版权归原作者所有,如涉及侵权,请联系删除。
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:2138次2018-08-13 09:22:15
-
浏览量:4065次2019-07-05 11:12:50
-
浏览量:2073次2019-12-13 18:21:20
-
浏览量:1976次2022-01-13 09:00:57
-
浏览量:2436次2018-01-02 16:03:58
-
浏览量:2720次2018-08-21 10:46:54
-
浏览量:5152次2020-02-21 12:02:55
-
浏览量:2336次2018-08-03 00:53:38
-
浏览量:2055次2019-12-25 15:37:50
-
浏览量:3471次2020-02-25 18:18:11
-
浏览量:3944次2020-03-19 10:10:20
-
浏览量:2017次2018-08-03 00:49:53
-
浏览量:2815次2020-01-08 11:20:32
-
浏览量:1880次2018-01-29 18:18:28
-
浏览量:2205次2019-08-21 15:24:40
-
浏览量:3337次2019-06-24 14:21:28
-
浏览量:2831次2018-10-30 21:28:43
-
浏览量:3049次2020-03-20 09:30:35
-
浏览量:1979次2018-06-04 15:06:13

易百纳技术社区
暂无个性签名~













-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
易百纳技术社区

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
