

海思芯片上LDC(镜头畸变校正)功能原理浅析
前言
海思35xx芯片专门有一个模块GDC(Geometry Distortion Correction)来对畸变图片进行校正。它里面其实有两个应用case,一个是fisheye校正,另外一个是LDC镜头畸变校正。
个人理解,两者主要区别是,前者主要用在摄像头镜头视角范围非常大,比如接近或超过180度,且想非常精细的对图像进行反畸变从而获得比较好的效果。 它一般需要先通过标定来获得摄像头畸变内参K1,K2,K3以及P1和P2(Kx指径向畸变参数,P指切向畸变参数),然后再进行反畸变。 而后者LDC主要用在较广角镜头,只考虑径向畸变的场景,不需要标定,算法实现较简单,只要调节一个参数K就能达到较好的一个效果(当然比不上FISHYE校正)。
本博文主要讨论LDC镜头畸变校正功能。
LDC镜头畸变原理
一般地,镜头畸变分为径向畸变和切向畸变。而径向畸变又分为桶形畸变(barrel)和枕形畸变(Pincushion)。它们在图像上表现如下所示。


切向畸变(正方形图像畸变成梯形)
LDC只考虑径向畸变,其简化的模型示意图如下所示。
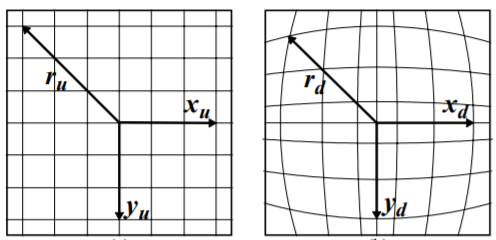
其中,ru为正常图像上某点到图像中心的距离,而rd为畸变图像上相同点到图像中心的距离。它们之间的关系可以简化为:

这里只有一个参数K(上面鱼眼模型里面有三个参数K1,K2以及K3)。
容易知道,对于桶形畸变,K>0,而对于枕形畸变,K < 0。当然K具体为什么值,要根据实际效果来调整。
LDC在海思上面的实现
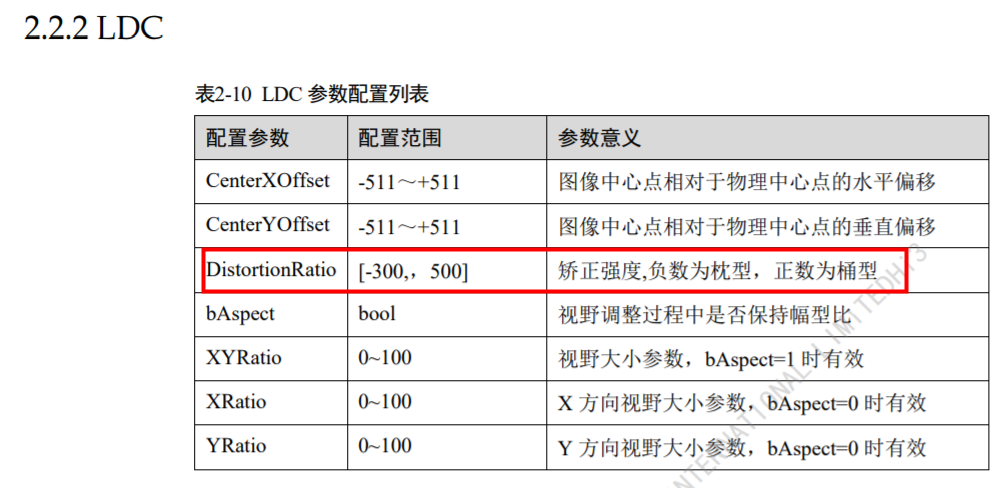
主要参考下面截图(GDC调试指南.pdf)来进行参数调节。上面所提到的参数K和下图红框所示参数相对应,是校正效果调节的主要项。
具体效果对比图如下所示(左图为校正前的图,右图为校正后的)

当然,也可以根据上面的数学模型自己来写代码实现,整个算法代码还是比较简单的。
原文链接:https://blog.csdn.net/ltshan139/article/details/107634047
相关推荐:
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:3398次2024-07-02 16:06:43
-
2024-01-11 15:44:19
-
浏览量:4272次2020-07-30 14:53:44
-
浏览量:15180次2019-09-21 19:14:57
-
浏览量:4049次2018-04-26 15:06:40
-
浏览量:7468次2022-08-11 09:31:37
-
2020-11-04 16:35:11
-
浏览量:2007次2019-09-18 16:32:09
-
浏览量:3799次2020-08-05 21:02:35
-
浏览量:4608次2020-09-24 11:58:24
-
浏览量:7819次2022-03-21 09:00:27
-
浏览量:4098次2023-12-29 16:51:41
-
浏览量:3393次2020-08-10 09:24:28
-
浏览量:4276次2020-08-05 20:32:31
-
浏览量:2935次2022-03-09 09:03:08
-
浏览量:1445次2024-02-05 17:05:51
-
浏览量:2635次2019-04-10 17:45:23
-
浏览量:2916次2024-02-22 15:52:02
-
浏览量:3603次2020-11-13 10:30:18

-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖

淡定哥

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
