

这只机器狗成精了!通过神经网络训练能自主攀爬上竖梯!
最近几年,四足机器人的运动能力与30年前相比,已经取得了巨大的突破。在全球研究机构的努力下,机器人在某些方面的能力已经可以与现实中动物一较高下。

Boston Dynamics -- Bigdog
Boston Dynamics -- Cheetah
MIT -- Mini Cheetah
尽管目前的四足机器人运动能力依然无法和现实中的动物相提并论。但是好在机器人不必受到生物学的限制,我们可以赋予机器人现实中生物所不具备的能力。

在前不久澳门举办的IROS2019会议上,我们就看见了这样一个例子:
东京都立大学的研究者们,通过特殊的结构设计,借助神经网络,赋予了四足机器人攀爬竖梯的能力。
尽管四足机器人能攀爬楼梯并不是什么新鲜事。诸多四足机器人都具有攀爬楼梯的能力。

Boston Dynamics -- spotmini

浙江大学 -- 绝影
然而,攀爬竖梯还是机器人历史上的头一遭。
即便对于常见的四足动物而言,攀爬竖梯也是相当具有挑战性的任务。这一任务的难点在于,随着梯子的陡度增加到垂直方向,质心会越来越远离梯级,此时便无法通过简单的站立支撑身体。对于没有抓握能力的动物而言,这是个相当大的问题。
目前大多数四足机器人都没有强大的抓取系统,但是将这种系统添加到机器人中似乎是一个很有前途的想法。东京都立大学的研究者们便开发了这样一款具有抓取能力的可爱的小机器人。
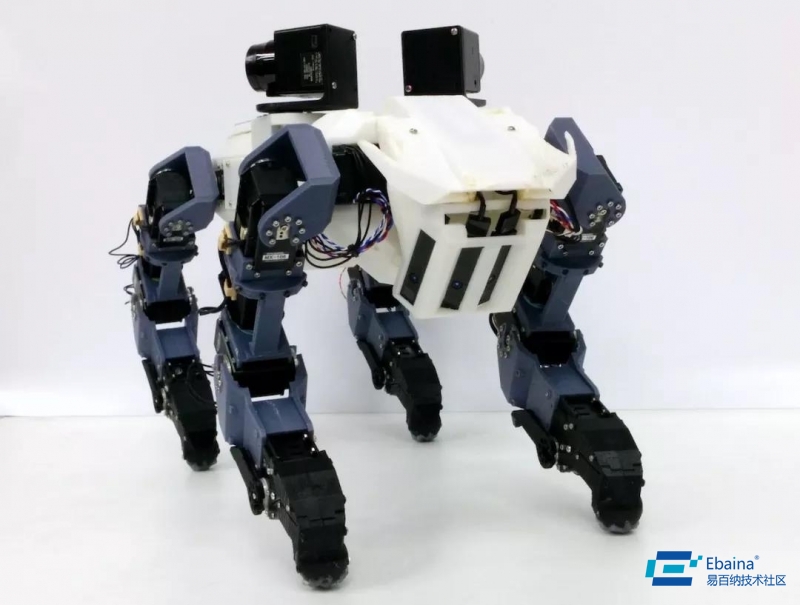
这个机器人重7公斤,全身共23个自由度。每条腿具有5自由度,其中包括一个拇指,可将其脚变成握爪。它能够使用这些握爪完全自主地爬上无扶手的垂直梯子。除此之外,机器人的头部具有一个自由度,双激光测距传感器具有另外两个自由度。
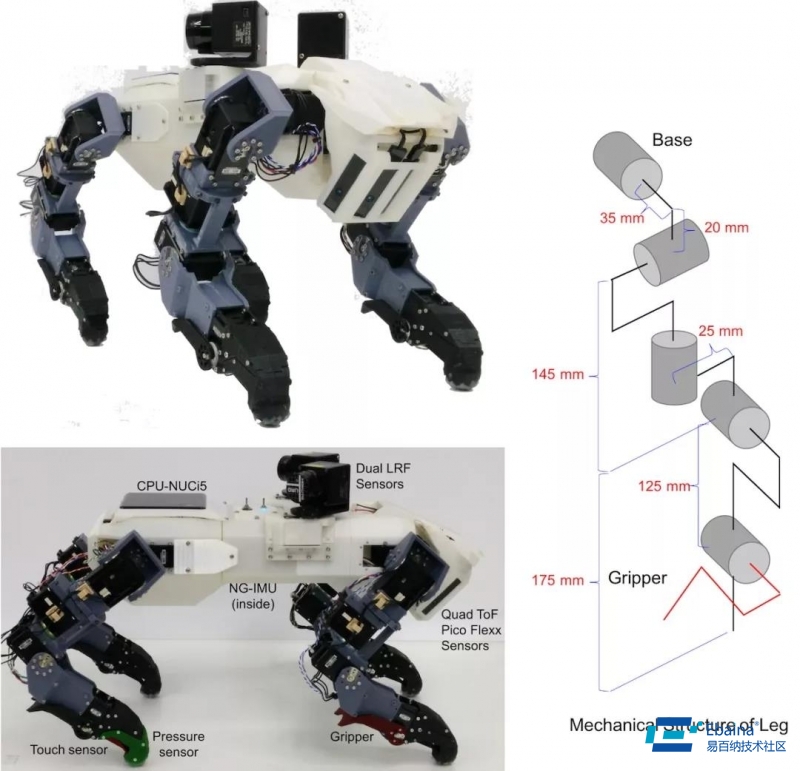
机器人配备有惯性测量单元(IMU),3D摄像机,以及触碰和力传感器。使用Intel NUC计算机作为主要控制设备,并且采用Arduino作为二级控制器,主要用于管理传感器IO信号。
为了实现机器人的自主攀爬,研究人员使用了循环神经网络对机器人进行训练。

从测试效果可以看出,在攀登过程中,机器人能够精准地找到并握持住竖梯栏杆。并且尽管直观上感觉从梯子到上表面的过渡似乎很难实现,但机器人聪明地利用其后腿抓住顶部梯级,并将其自身推到平台上。
目前这一系统还存在着一些不足。比如自主系统是在此特定梯子上进行训练的,并且花了五次尝试才能使它正确无误,但据研究人员解释,失败是由于执行器扭矩不足造成的。
在未来,东京都立大学的研究者计划通用化这一系统,以便无需事先训练即可爬上新的竖梯。期待未来这些研究者们带给我们更大的惊喜。
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:1559次2024-02-20 17:08:32
-
浏览量:663次2023-09-02 09:45:20
-
浏览量:4036次2018-02-14 10:30:11
-
浏览量:1057次2023-02-09 09:35:45
-
浏览量:747次2023-09-04 11:16:00
-
浏览量:622次2023-07-18 13:41:23
-
浏览量:874次2023-07-05 10:11:45
-
浏览量:636次2023-07-05 10:11:51
-
浏览量:1177次2023-03-13 14:06:09
-
浏览量:5145次2021-04-15 15:51:43
-
浏览量:800次2023-09-06 11:12:55
-
浏览量:2226次2020-07-03 14:29:26
-
浏览量:1189次2023-07-05 10:11:54
-
浏览量:561次2023-09-06 10:09:13
-
浏览量:1195次2023-03-07 09:26:18
-
浏览量:141次2023-08-31 08:46:00
-
浏览量:5071次2021-07-26 11:28:05
-
浏览量:1643次2023-04-14 14:37:29
-
浏览量:5379次2021-05-21 17:03:03
A-小鲸鱼
我就是我,不一样的烟火~


-
621篇
-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
A-小鲸鱼

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
