

Science Robotics|MIT新型两足机器人,可利用人类反射来行走和保持平衡!
MIT的研究者近日验证了一种新的遥控系统,可以允许双足机器人“借”人的物理行动技巧来获得更为敏捷的运动。这个系统类似于斯皮尔伯格大电影《头号玩家》中的触觉服,但在电影中,触觉服用来连接人与VR设备,而MIT提出的系统则将人与机器人相连。
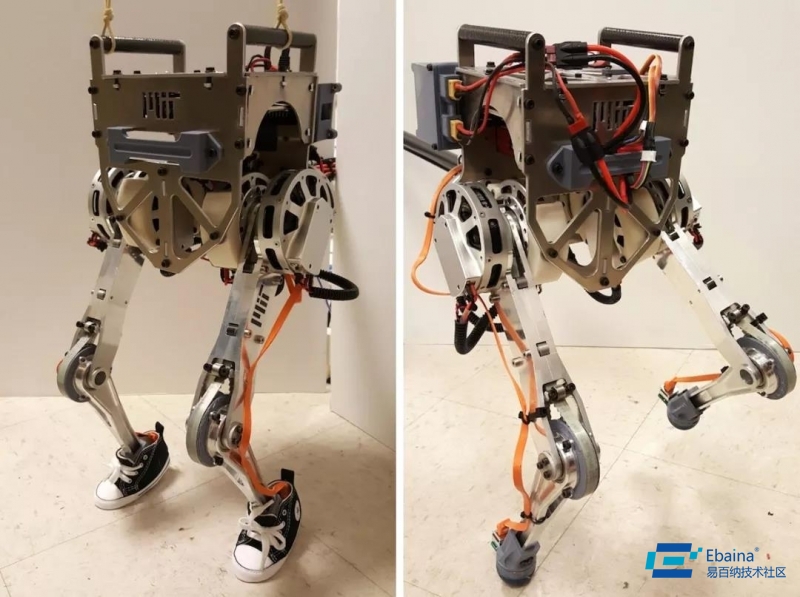
这款机器人叫做LittleHERMES,准确来讲仅仅是一对正常成年人三分之一尺寸的机械腿。它可以在固定位置站立或跳跃,也可以在龙门架的支持下行走一小段距离。尽管功能较为简单,但研究人员表示,他们的方法可以帮助使有能力的灾难营救机器人更接近现实。尽管目前的技术取得了进步,但要制造出具有与人类相当的运动和决策能力的全自动机器人仍然是一个挑战。这就是需要更先进的远程操作系统的原因。
伊利诺伊州立大学香槟分校的助理教授João Ramos和麻省理工学院仿生机器人实验室主任Sangbae Kim在近期发布的《Science Robotics》杂志中对这个项目进行了解读。在文章中,他们提出现存的远程操作系统无法准确将操作者的行为传递到机器人上。同时,传统的系统无法向远程操作员提供有关机器人正在做什么的物理反馈。基于以上两点,在试验中探究这些机制是如何工作的,他们制作了Little HERMES。

图中显示的是LittleHERMES的主要结构。(A)为定制的驱动器,可以承受冲击并产生高扭矩。(B)为轻量化的肢体,惯性低,促使腿部的快速摆动。(C)为轻型足部力传感器,其具有三轴接触力传感器。(D)为惯性测量单元,可以估算机器人躯干姿态、角速度和线加速度。(E)为NI公司的实时控制器sbRIO 9606,用于机器人的控制。(F)为两个串联的三节锂聚合物电池。(G)为轻量化刚性框架,可有效降低机器人的重量。
今年稍早些时候,MIT的研究者们在IEEESpectrum深度介绍了这个项目,包括Little HERMES和它的大哥哥,HERMES(Highly Efficient Robotic Mechanisms and Electromechanical System)。在文章中,他们介绍了这套系统的两个组成部分:


“我们搭建的机器人远程系统具有两个部分:一个具有敏捷和动态行为的类人机器人,和一个双向的人机交互方式,可以通过它将你的行为传递给机器人,也可以将机器人的行为传递给你。因此,如果机器人踩到碎片并开始失去平衡,操作员会感到同样的不稳定,并会本能地做出反应以避免跌落。然后,我们捕获该物理响应并将其发送回机器人,这也有助于避免跌倒。通过这种人机交互,机器人可以利用操作员的固有运动技能和瞬间反射来保持立足点。因此,可以说我们将人的大脑放在了机器人中。”
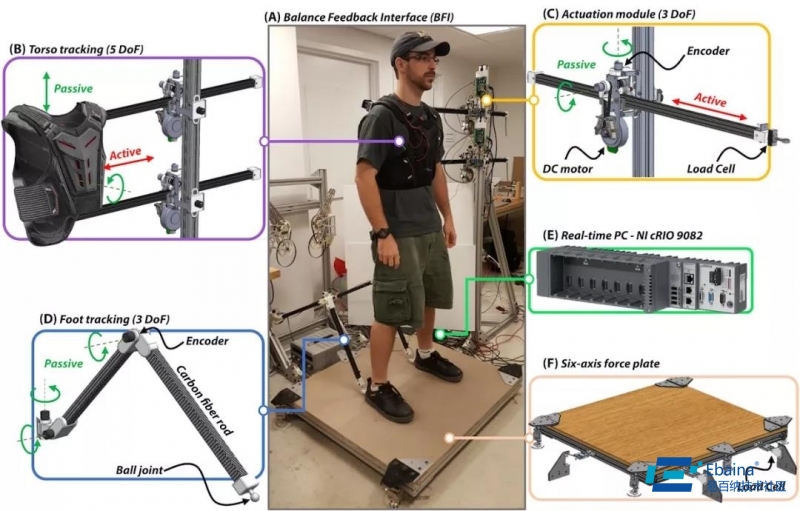
MIT研究人员开发出用于控制Little HERMES的人机交互设备与传统控制不同,它依靠操作者的反射来增强机器人的稳定性。研究人员称其为平衡反馈交互(balance-feedbackinterface, or BFI)。图中介绍了BFI的主要模块:(A)用于躯干和脚的自定义界面附件,可以高速捕获人体运动数据(1kHz)。(B)两个欠驱动模组,可以捕获躯干的位置和姿态,并向操作者施加力。(C)每个驱动模块具有三个自由度,其中一个是由直流无刷电机驱动的推/拉杆。(D)带有被动关节的串联连杆,连接到操作员的脚上并跟踪其空间平移。(F)NI公司的实时控制器cRIO 9082,使BFI控制回路形成闭环。(F)底部力检测板,用于估算操作者的压力中心位置,并测量操作者净接触力的剪切力和法向分量。
在文章中,MIT的研究者们解释了这套远程控制系统开发过程中的挑战。这个控制策略的挑战在于如何正确地将人体运动映射到机器上,同时将机器人重现运动的程度反馈给操作者。因此,他们提出了一种针对双边反馈策略的解决方案,以控制双足机器人与操作者同步地采取踏步,跳跃和行走。这种动态同步通过两个步骤实现:(i)实时将人类运动的核心数据缩放到机器人比例;(ii)向操作者施加反馈力,其大小与人和机器人之间的相对速度成比例。
从字面上看,LittleHERMES现在正迈出第一步,但研究人员表示,他们希望将具有类似设计的机器人腿用作更高级的类人机器人的一部分。他们设想的一种可能性是快速移动的四足机器人,该机器人可以在各种地形中运行,然后转变为双足机器人,可以通过双手进行灵巧的操纵。这可能涉及到将一些MIT研究人员在实验室中开发的机器人结合,例如Cheetah和HERMES合并,或者Mini Cheetah和Little HERMES合并。让我们一起期待这种人机交互机器人的诞生吧!
HERMES介绍网站:
https://spectrum.ieee.org/robotics/humanoids/human-reflexes-help-mits-hermes-rescue-robot-keep-its-footing
- 分享
- 举报
 微信扫码分享
微信扫码分享 QQ好友
QQ好友
 暂无数据
暂无数据-
浏览量:1111次2023-02-16 19:01:03
-
浏览量:2061次2018-11-18 18:56:57
-
浏览量:2496次2018-07-09 10:15:59
-
浏览量:1784次2022-12-17 10:24:18
-
浏览量:2108次2018-06-26 20:06:38
-
浏览量:2513次2018-01-06 21:01:01
-
浏览量:2377次2019-01-22 21:32:55
-
浏览量:930次2023-11-22 10:42:51
-
浏览量:1776次2018-06-05 16:11:04
-
浏览量:1542次2019-07-05 11:07:47
-
浏览量:3002次2022-09-27 11:03:13
-
浏览量:1037次2023-04-17 16:16:11
-
浏览量:5868次2020-11-25 09:49:19
-
浏览量:1956次2018-04-28 20:10:45
-
浏览量:1591次2023-04-23 09:38:45
-
浏览量:1646次2023-04-14 14:37:29
-
浏览量:701次2023-07-26 14:08:30
-
浏览量:1511次2019-11-11 14:28:44
-
浏览量:3449次2022-01-11 09:00:17
-
广告/SPAM
-
恶意灌水
-
违规内容
-
文不对题
-
重复发帖
cobut509

 微信支付
微信支付
举报类型
- 内容涉黄/赌/毒
- 内容侵权/抄袭
- 政治相关
- 涉嫌广告
- 侮辱谩骂
- 其他
详细说明
审核成功
审核失败



关注公众号
社区问题咨询:Ebaina-CN
定制需求咨询:xxqk158820
